

Plusieurs petits satellites sont en route vers la Lune
Lors du vol Artemis 1, dix petits satellites, des cubesats, étaient à bord du Space Launch System. Un autre cubesat est en route pour la Lune, lancé avec l’atterrisseur Hakuto-R.
Voici quelques nouvelles, plus ou moins bonnes, de ces missions secondaires.
10 cubesats à bord du SLS aux résultats mitigés
10 cubesats étaient installés sur l’Orion Stage Adapter (OSA, ou étage adaptateur d’Orion) sur le SLS d’Artemis 1.

Après le lancement du 16 novembre, les cubesats ont été déployés à partir de l’OSA après la séparation d’Orion du SLS et à une distance de sécurité du vaisseau.

Faisons le point sur les cubesats plus ou moins dans leur ordre de déploiement :
ArgoMoon renvoie des images
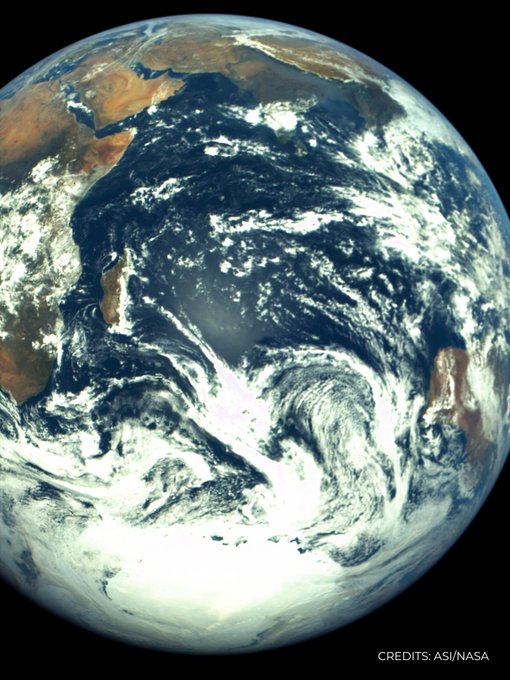
ArgoMoon fabriqué par ArgoTec à Turin, sous la supervision de l’Agence spatiale italienne (ASI) a été correctement déployé. Il devait observer l’étape de propulsion ICPS du SLS avec une optique avancée et un système d’imagerie logicielle mais je n’ai pas vu de telles images à ce jour. Il a toutefois renvoyé plusieurs images de la Terre et de la Lune.
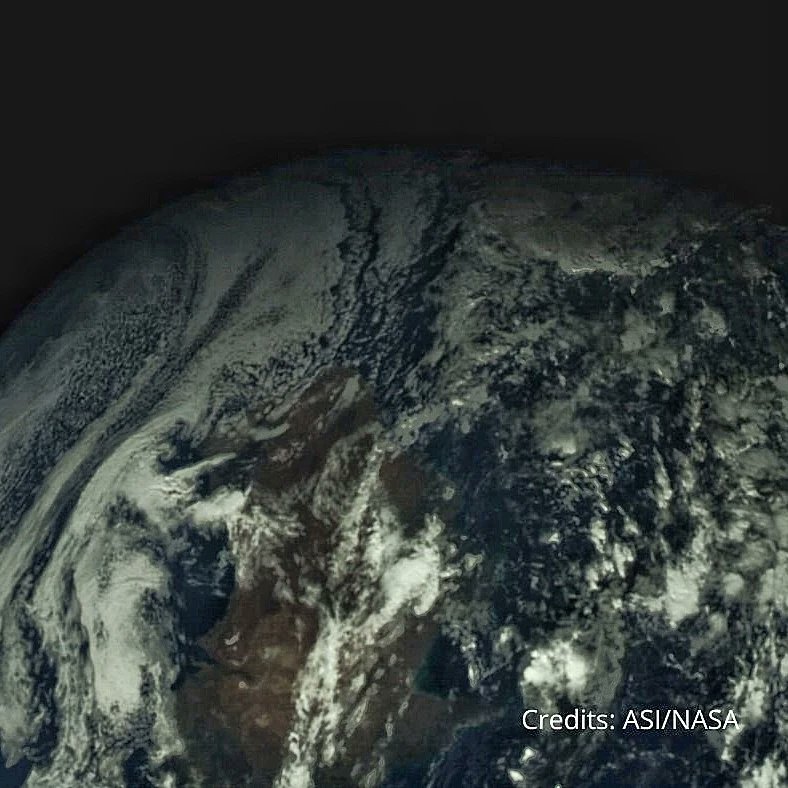


ArgoMoon a réussi à faire un survol de la Lune. Ces images ont été publiées le 22 novembre sans plus de précisions :
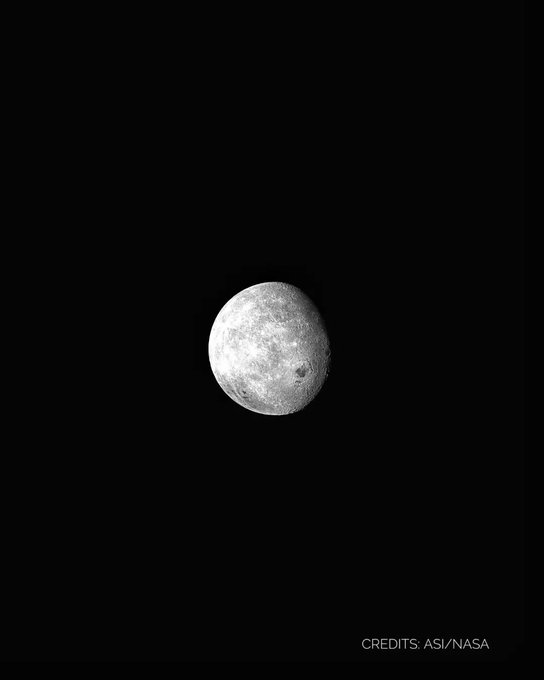
Des images ont été publiées les 23 et 25 novembre, avec la seule précision de la distance d’ArgoMoon de la Terre et de la Lune.


BisoSentinel a débuté sa mission
BioSentinel, un cubesat développé par le centre de recherches Ames de la NASA en Californie, doit utiliser des micro-organismes sous forme de levure unicellulaire comme biocapteur pour détecter, mesurer et comparer l’impact du rayonnement dans l’espace lointain sur les organismes vivants sur une longue période de temps.
La NASA a rapidement reçu la télémétrie après le déploiement mais a perdu dans un premier temps le contrôle du satellite, puis a récupéré la mission. Le cubesat a effectué un survol de la face cachée de la Lune le 22 novembre. L’expérience a commencé le 5 décembre [source].
Pour suivre en temps réel BioSentinel : https://eyes.nasa.gov/apps/solar-system/#/sc_biosentinel

Equuleus en route pour sa destination finale
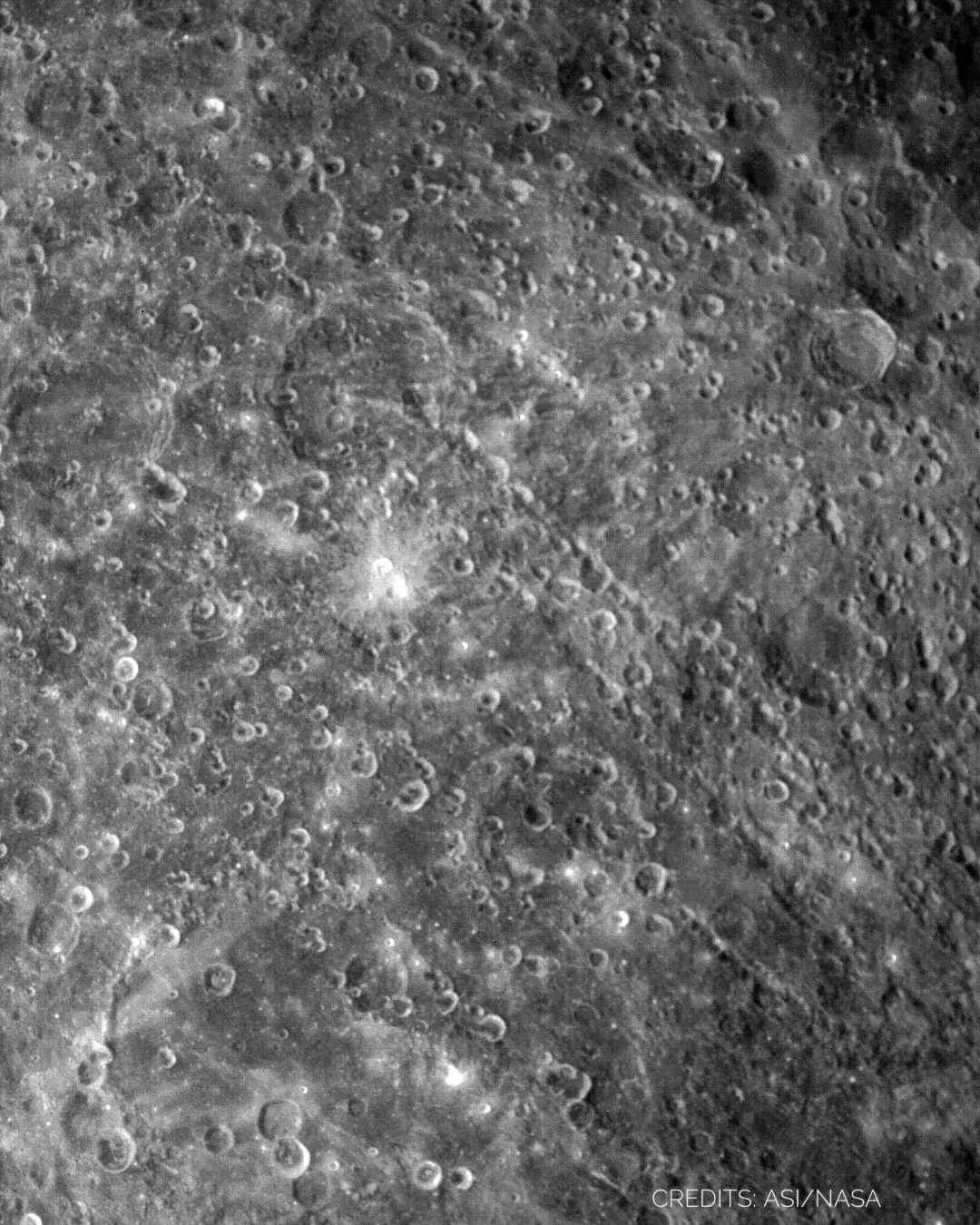
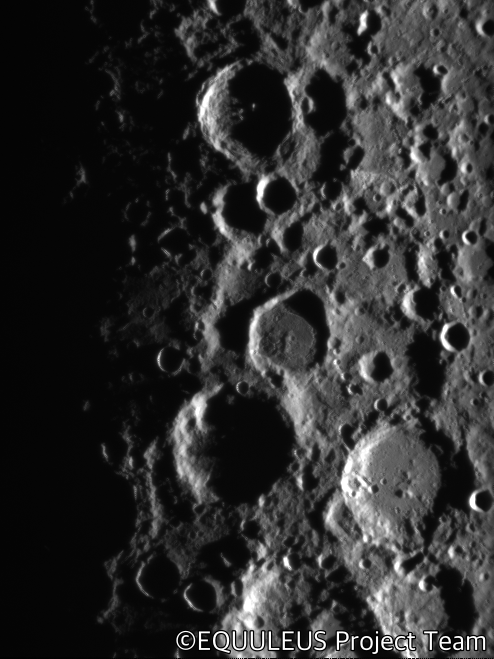
EQUULEUS de l’Université de Tokyo et de la JAXA est en route pour le point de Lagrange L2 Terre/Lune. Il va y étudier la plasmasphère de la Terre pour une meilleure compréhension de l’environnement de rayonnement de la Terre. Sur sa route, il a réussi à photographier le terminateur, la ligne de démarcation entre le jour et la nuit sur la face cachée de la Lune :
Les communications perdues avec Lunar IceCube ?
Lunar IceCube de l’université de Morehead dans le Kentucky doit rechercher de l’eau sous toutes ses formes et autres volatiles avec un spectromètre infrarouge. Il s’est correctement déployé du SLS mais le 29 novembre le centre NASA Goddard, qui a fourni le spectromètre BIRCHES, indiquait qu’il poursuivait ses tentatives de communication avec le cubesat afin qu’il puisse être placé sur son orbite scientifique dans les prochains jours. Il n’y a pas eu de mise à jour de l’état du satellite à ce jour.
LunarIR, Omotenashi et NeaScout perdus
LunIR fabriqué par Lockheed Martin (Denver, Colorado) devait effectuer une imagerie infrarouge avancée de la surface lunaire. Mais les stations au sol ont vu un signal plus faible que prévu. La mission est considérée comme perdue par le fabricant même s’il dit avoir beaucoup appris comme le développement du plus petit cryocooler spatial au monde [nécessaire au refroidissement des détecteurs infrarouges] qui va servir pour de futures missions de la NASA.

OMOTENASHI de la JAXA est un démonstrateur de la JAXA pour poser de petites expériences sur la Lune en utilisant un propulseur à ergols solides et un airbag et étudier l’environnement lunaire, notamment les radiations. Rapidement le centre de contrôle de l’agence japonaise a indiqué que le cubesat n’avait pas établi d’acquisition stable du Soleil et que les communications descendantes avec le centre de mission étaient instables
La JAXA a déclaré la mission en échec le 22 novembre.

NEASCOUT, une mission innovante de voile solaire de la NASA de 86m2 devait partir survoler l’astéroïde géocroiseur 1991 VG. Après le déploiement, l’équipe du Marshall Space Flight Center n’a pas réussi à prendre contact avec le cubesat. Le 21 novembre, les contrôleurs ont commandé un déploiement d’urgence de la voile solaire « Si le vaisseau spatial écoute et ouvre avec succès sa voile, il pourrait être vu depuis des télescopes sur Terre« .
Il n’y a pas d’autre statut sur la mission depuis le 9 décembre.

Propulsion en panne pour LunaH-Map mais la mission continue
LunaH-Map développé par l’Arizona State University à Tempe, devait cartographier avec une grande résolution la présence d’hydrogène proche de la surface dans les cratères et autres régions ombragées en permanence du pôle Sud lunaire avec des spectromètres à neutrons.
Le début de mission s’est bien passé avec le déploiement des panneaux solaires, la mise en service des systèmes de communications et du spectromètre. Mais le 17 novembre, après de nombreuses tentatives d’allumage du système de propulsion pour le survol de la Lune prévu le 21 novembre, la NASA communiquait sur l’absence de manœuvre possible à temps pour la mise sur orbite lunaire polaire.
LunaH-Maps a toutefois réalisé un survol de la Lune à moins de 1300 km de la surface et le spectromètre à neutrons a collecté des données. Les données du détecteur montrent clairement que les neutrons et les rayons gamma de la surface de la Lune augmentent le long du survol, démontrant que l’instrument fonctionne comme prévu et pourrait atteindre la mission scientifique de LunaH-Map. Après le survol, LunaH-Map a acquis plusieurs images de la Lune avec son senseur stellaire et a effectué un essai de navigation automatique et un test de télémétrie avec le Deep Space Network de la NASA.

Le 2 décembre, LunaH-Map a acquis avec succès des observations de Mars et d’Uranus et les a traitées à bord à l’aide des routines autonomes du logiciel de navigation optique. Le test a été réussi et a démontré que le logiciel de navigation automatique pouvait corriger de manière autonome les images brutes à bord, estimer l’orientation de la caméra inertielle à l’aide d’étoiles visibles, calculer les centres astrométriques des cibles planétaires dans le champ d’observation et calculer les décalages par rapport à l’état de la sonde. Chacune de ces mesures est essentielle pour effectuer une navigation autonome avec des images embarquées, sans l’intervention des opérateurs sur Terre. Des algorithmes de navigation optiques comme celui démontré sur LunaH-Map seront importants pour les futures petites sondes pour effectuer des opérations dans l’espace lointain, compte tenu de leurs ressources de communication minimales (source).

Les équipes de la mission tentent de récupérer le système de propulsion en chauffant pendant plusieurs heures une vanne qui serait bloquée, afin de faire la mission initiale avec le survol du pôle sud lunaire.
Team Miles communique
Team Miles, est un cubesat qui a remporté le NASA CubeQuest Challenge, une compétition visant à encourager les citoyens à inventer des technologies abordables pour les engins spatiaux miniatures. Il doit démontrer un nouveau type de propulsion plasmique à faible poussée à l’iode avec le moteur ContantQTM de Miles Space.
Miles Space a communiqué le 10 décembre que « le cubesat était vivant et envoyait des signaux radio. Les stations au sol de la NASA tenteront de se connecter la semaine prochaine ou suivante ».
CuSP en mauvaise posture
CuSP, Cubesat for Solar Particles, développé par le Southwest Research Institute à San Antonio au Texas, doit mesurer les particules du vent solaire et les champs magnétiques du Soleil. Dans un communiqué, la NASA a confirmé que le cubesat CuSP a été déployé environ 8 heures après le lancement. Environ 2 heures après le déploiement, les transmissions CuSP ont été reçues par le Laboratory’s Radio Science Systems Group du Jet Propulsion Laboratory de la NASA pendant environ 60 minutes, confirmant le déploiement des panneaux solaires et le pointage stable vers le Soleil.
Cependant, des réinitialisations logicielles à 3 reprises et des relevés de température anormaux ont été rapportés pendant le contact. Deux minutes avant la fin de la période de collecte des données sur ce contact initial, l’une des cellules de la batterie a soudainement connu une hausse de température, passant de 34°C à plus de 168°C en moins d’une minute. La température de la cellule anormale est ensuite passée d’environ 34°C à environ 80°C avant la perte de contact.
Malheureusement, l’équipe CuSP n’a pas rétabli le contact avec le cubesat après le contact initial. Il n’y a pas de mise à jour sur le site de la NASA depuis le 8 décembre, où il était indiqué que l’équipe de la mission analysait la télémétrie reçue et essayait de reprendre contact avec le cubesat.

Lunar Flashlight en route aussi
La mission Artemis 1 devait partir au départ avec 13 cubesats mais Lunar Flashlight n’était pas prêt à temps à cause d’une anomalie sur son système de propulsion. Il a finalement décollé comme passager secondaire à bord d’une Falcon 9 avec le lancement de l’atterrisseur Hakuto-R le 11 décembre.
Le cubesat 6U développé par le NASA’s Jet Propulsion Laboratory doit rejoindre une orbite lunaire hautement elliptique avec un survol à moins de 15 kilomètres de la surface sur le pôle sud et à 70 000 kilomètres de la Lune pour son point le plus éloigné, une orbite similaire à celle de CAPSTONE.
Lunar Flashlight doit utiliser ses 4 lasers en proche infrarouge pour éclairer les régions polaires ombragées de la Lune, tandis qu’un réflecteur embarqué mesurera la réflexion de surface et sa composition. Il recherchera des preuves de la présence de glaces d’eau au pôle sud lunaire. Le cubesat est la seconde mission à tester un carburant « plus vert » avec le carburant ASCENT (Advanced Spacecraft Energetic Non-Toxic), après le satellite GPIM (Green Propellant Infusion Mission) en 2019, un carburant moins toxique que l’hydrazine et 50% plus efficace.
Lunar Flashlight a communiqué avec les contrôleurs de mission et a confirmé qu’il était en bonne santé. Il arrivera en orbite lunaire en avril.
Pour suivre la mission Lunar Flashlight en temps réel : https://eyes.nasa.gov/apps/solar-system/#/sc_lunar_flashlight

Au moment de la publication de cet article, avec les informations disponibles, on a donc 5 cubesats qui fonctionnent bien, 3 qui sont dans des états détériorés et 3 qui sont perdus.
Image de couverture : BioSentinel en orbite lunaire (crédit NASA)
En savoir plus sur Rêves d'Espace
Subscribe to get the latest posts sent to your email.
Ping : Allgemeines Live-Blog ab dem 19. 12. 2022 | Skyweek Zwei Punkt Null