

Luna-25 : le retour des Russes sur la Lune ?
Après une période de 47 ans sans mission lunaire, la Russie retourne sur la Lune avec la mission automatique Luna-25 (Луна-25).
Comme pour d’autres nations, la Lune (re)devient un enjeu technologique, scientifique et aussi politique après plusieurs décennies de désintérêt. A travers Luna-25, la Russie entend bien confirmer son statut technologique et assurer son accès à la surface lunaire, et préparer de futures missions lunaires habitées.

Le renouveau de l’exploration lunaire après de grandes premières soviétiques
L’histoire de l’exploration de la Lune par l’Union Soviétique débute en 1959 avec le crash de Luna-2. Luna 3 réussit la première image de la face cachée de la Lune en 1959 et et c’est avec Luna-9 que le premier atterrissage « en douceur » est effectué sur la Lune en 1966. Avec plusieurs autres missions dont Luna-16 et les premiers retours d’échantillons du sol lunaire, puis Lunakhod-1 le premier rover lunaire, l’URSS réussit plusieurs missions automatiques mais abandonna les vols habités vers la Lune après la réussite du programme Apollo. Luna-24, qui aurait dû s’appeler Luna-45 si les Soviétiques n’avaient pas dissimulé les 21 échecs depuis Luna-1, marque la dernière mission soviétique lunaire avec une 3e mission de retour d’échantillons en août 1976. L’URSS se concentra alors dans les vols habités en orbite basse et l’exploration robotique de Mars notamment. Luna-24 resta longtemps la dernière mission sur la Lune avant l’atterrissage du Chang’e3 chinois en 2013.
Le nouveau projet Luna-Glob comprend l’atterrisseur Luna-25, le lanceur, les moyens sols de suivi de la mission et de traitement des résultats scientifiques. Le segment sol dédié à la mission sera très important pour communiquer en direct avec l’atterrisseur, a contrario de Chandrayaan-3 par exemple qui passe par le relais de l’orbiteur Chandrayaan-2.
Et si tout va bien, les missions Luna-26 (un orbiteur qui doit cartographier la répartition de la glace d’eau sur la surface lunaire), Luna-27 (étude de la glace au pôle sud) et Luna-28 (retours d’échantillons), sont annoncées pour des missions de plus en plus complexes jusqu’au retour d’échantillons prélevés à une profondeur jusqu’à 2 mètres sous le régolithe lunaire à la recherche d’eau gelée.
Un atterrisseur, 8 caméras, 8 instruments scientifiques
Le design de Luna-25 est peu différent de ses ancêtres crées chez NPO Lavochkin, notamment le programme martien Phobos-Grunt, mais il comporte des équipements électroniques modernes.
D’une masse à vide de 615 kg, et au décollage de 1750 kg avec le carburant, il y a 30 kg d’équipements scientifiques à bord. L’ensemble fait 3,17 m de haut sur un empiètement de 3,7 m.

Luna-25 se compose de deux parties : La partie supérieure avec des équipements pour le fonctionnement global, d’instruments scientifiques et les panneaux solaires. La partie inférieure se compose des réservoirs de carburant avec le système de propulsion et les jambes d’atterrissage.

Le système de navigation comprend 2 senseurs d’étoiles, 2 systèmes inertiels et 2 senseurs solaires, complété par un Doppler pour la mesure de l’accélération et des distances. Le système de communication est en bande X. Un ordinateur de bord (BIVK-R) complète les équipements de « service ».
Le système de propulsion comprend un moteur principal pour les manœuvres jusqu’à l’orbite lunaire et le freinage, développant 4,7 kN. 2 moteurs de 588 N seront utilisés pour l’atterrissage et 12 moteurs (8 de 6N et 4 de 49N) seront utilisés pour le contrôle d’attitude.
Il sera possible de réguler la température du moteur en fonctionnement pendant le vol à l’aide d’un couvercle qui ferme la tuyère du moteur de la sonde. S’il fait trop chaud, le couvercle s’ouvrira. Dès que la température redeviendra normale, elle sera à nouveau fermée. Avant d’atterrir, le couvercle sera éjecté de manière à ne pas gêner le fonctionnement du moteur.

Les 8 caméras de Luna-25 photographieront la surface lunaire depuis l’orbite puis pendant la descente et ensuite le site d’atterrissage en panorama.
Un bras robotique (LMK) de 1,5 m de long transportera des échantillons du sol gratté grâce au godet en son extrémité, vers des capteurs analytiques et testera les propriétés mécaniques de la surface.
Une suite d’instruments scientifiques effectuera une analyse chimique et spectrale du régolithe environnant dans le but principal de trouver de l’eau lunaire [voir ci-après]. Le contrôle thermique de ces instruments est assuré par un système de caloducs d’ammoniac transférant la chaleur excessive à des radiateurs.
La recherche scientifique sera réalisée principalement lors d’une journée lunaire (14 jours terrestres). Pendant la nuit lunaire, les équipements de l’atterrisseur seront éteints et le contrôle thermique sera maintenu par un générateur thermoélectrique radio-isotopique (RITEG) à base de plutonium qui fournira entre 125 et 145 watts. Les 5 panneaux solaires rechargeront la batterie Li-ion. Le RITEG fournit également une horloge temps réel pour le réveil des électroniques lors des matins lunaires.

Les différents instruments scientifiques à bord doivent analyser la couche supérieure du régolite de surface et l’exosphère lunaire. L’un des principaux objectifs est d’estimer la fraction massique d’eau dans la couche supérieure du régolithe polaire jusqu’à 40 cm de profondeur.
Au total, pendant l’exploitation de la mission, il est prévu d’analyser 11 échantillons prélevés à différents endroits et profondeurs par le LMK.

Le vent solaire vient heurter directement la surface lunaire, créant un semblant de ionosphère lunaire ou exosphère. Les recherches de Luna-25 pourraient aider à mieux comprendre l’interaction de ce plasma d’ions chargés avec les poussières lunaires, qui sont un danger pour les équipements car elles collent à n’importe quelle surface, pénètrent les systèmes censés être étanches, et entravent les mécanismes. Les microparticules de poussière sont toxiques et hautement réactives. De plus, sous l’influence du rayonnement ultraviolet du Soleil, les particules de poussière peuvent acquérir une charge électrique.
En détails les instruments scientifiques :
| Nom de l’instrument | Objectifs scientifiques | Masse | Fabricant |
|---|---|---|---|
| ADRON-LR (АДРОН-ЛР) | Analyseur à distance du rayonnement gamma et des neutrons actifs dans le régolite pour savoir s’il y a de la glace d’eau dans le sol, et pour évaluer sa quantité et de comprendre comment elle est distribuée en profondeur. | 6,7 kg | IKI RAS |
| ARIES-L (АРИЕС-Л) | Étude du régolite lunaire en mesurant les ions secondaires et les particules neutres éliminées du régolite par le vent solaire, ainsi que l’étude de la composition et de la dynamique du plasma et des composants neutres de l’exosphère | 4,6 kg | IKI RAS |
| LAZMA-LR (ЛАЗМА-ЛР) | Spectromètre de masse laser pour l’analyse de la composition chimique, élémentaire et isotopique d’échantillons de sol lunaire prélevés par le LMK | 2,7 kg | ICI / Université de Berne |
| LIS-TV-RPM (ЛИС-ТВ-РПМ) | Étude à distance de la composition minéralogique du régolite dans les bandes visible et infrarouge (le bloc optique est installé sur le manipulateur LMK) | 2,0 kg | IKI RAS |
| Pml (ПмЛ) | Étude de la composition et de la dynamique des particules de poussière lunaire, des micrométéorites et des champs électriques à proximité de l’atterrisseur | 0,9 kg | IKI RAS |
| LMK (ЛМК) | Un bras manipulateur avec un dispositif de manutention au sol pour fournir des échantillons de régolite au dispositif LAZMA-LR et pour pointer l’unité optique de la caméra LIS-TV-RPM | 5,5 kg | IKI RAS |
| BUNI (БУНИ) | Le bloc de gestion des informations scientifiques (BUNI) combine des instruments scientifiques (sauf STS-L) en un seul système : contrôle leur fonctionnement, surveille l’alimentation et transfère les télécommandes reçues de la Terre. En fait, c’est le cerveau de toute la partie scientifique de Luna 25. | 2,3 kg | IKI RAS |
| STS-L (СТС-Л) | Système de prises de vue vidéo (y compris. h. stéréo) de la surface autour de l’atterrisseur pour construire un modèle tridimensionnel du site. Le STS-L se compose de 8 caméras. : 2 se tiennent en bas près du moteur et photographieront pendant le fonctionnement du moteur, 4 caméras panoramiques grand angle situées en haut du lander commenceront à fonctionner pendant la descente et, après l’atterrissage, elles feront un panorama circulaire, et 2 caméras stéréo regardent le bras LMK et sa zone de travail. | 4,6 kg | IKI RAS |
| Réflecteur de coin laser | Mesures de la distance à l’appareil | 1,0 kg | NPO SPP |
Le démonstrateur PILOT-D, composé d’une caméra et d’une unité d’interface de démonstration de caméra (CDIU) entre la caméra et la plate-forme d’atterrissage russe, pour aider à un « atterrissage précis et intelligent à l’aide des technologies embarquées », devait être fourni par l’ESA et suite à la guerre en Ukraine, il n’a pas été livré.

Le programme scientifique prévisionnel est chargé et débute juste après l’atterrissage avec un panorama du site et vérification du bon fonctionnement de tous les instruments. Il s’intenfiera au premier jour lunaire avec le premier prélèvement d’échantillons de sol lunaire et des analyses à distance, et la construction de carte tridimensionnelle de la zone d’atterrissage.
Luna-25 et prévu pour durer 1 an à la surface de la Lune.
Direction le pôle sud !
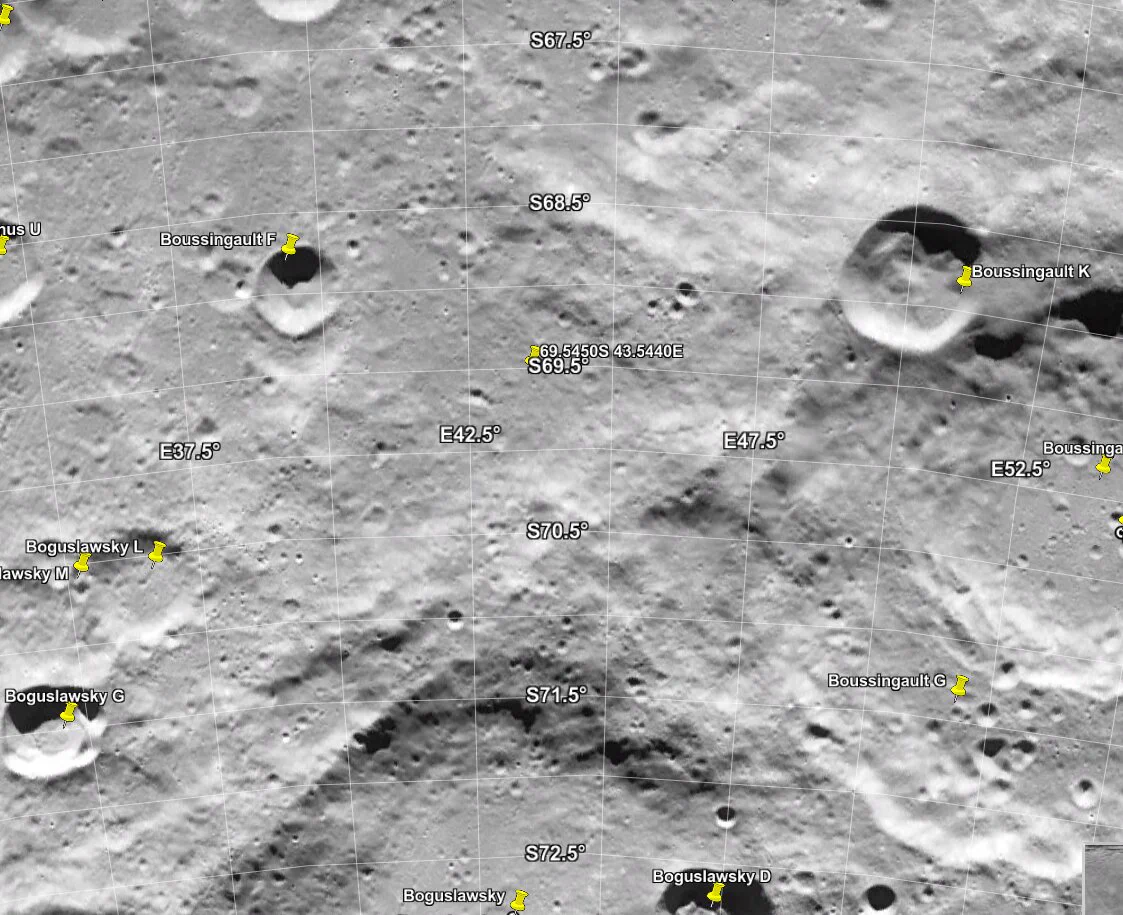
Comme pour Chandrayaan-3, les zones d’atterrissage choisies sont localisées au pôle sud de la Lune, en fonction de critères d’ingénierie et de critères scientifiques. Il faut une zone suffisamment plate, bien éclairée (environ 45 % du jour lunaire) et visible de la Terre pour les communications avec les antennes terrestres russes. Les zones ont été sélectionnées pour la présence possible de glace d’eau et de composés volatiles dans le régolithe.
La cible du site d’atterrissage principal est située aux coordonnées 69,5S 43,5E, au nord du cratère Boguslawsky, du nom d’un astronome allemand, à mi-chemin entre les cratères Boussingault F et Boussingault K, du nom de Jean-Baptiste Boussingault, chimiste, botaniste et agronome français et passionné de volcans.
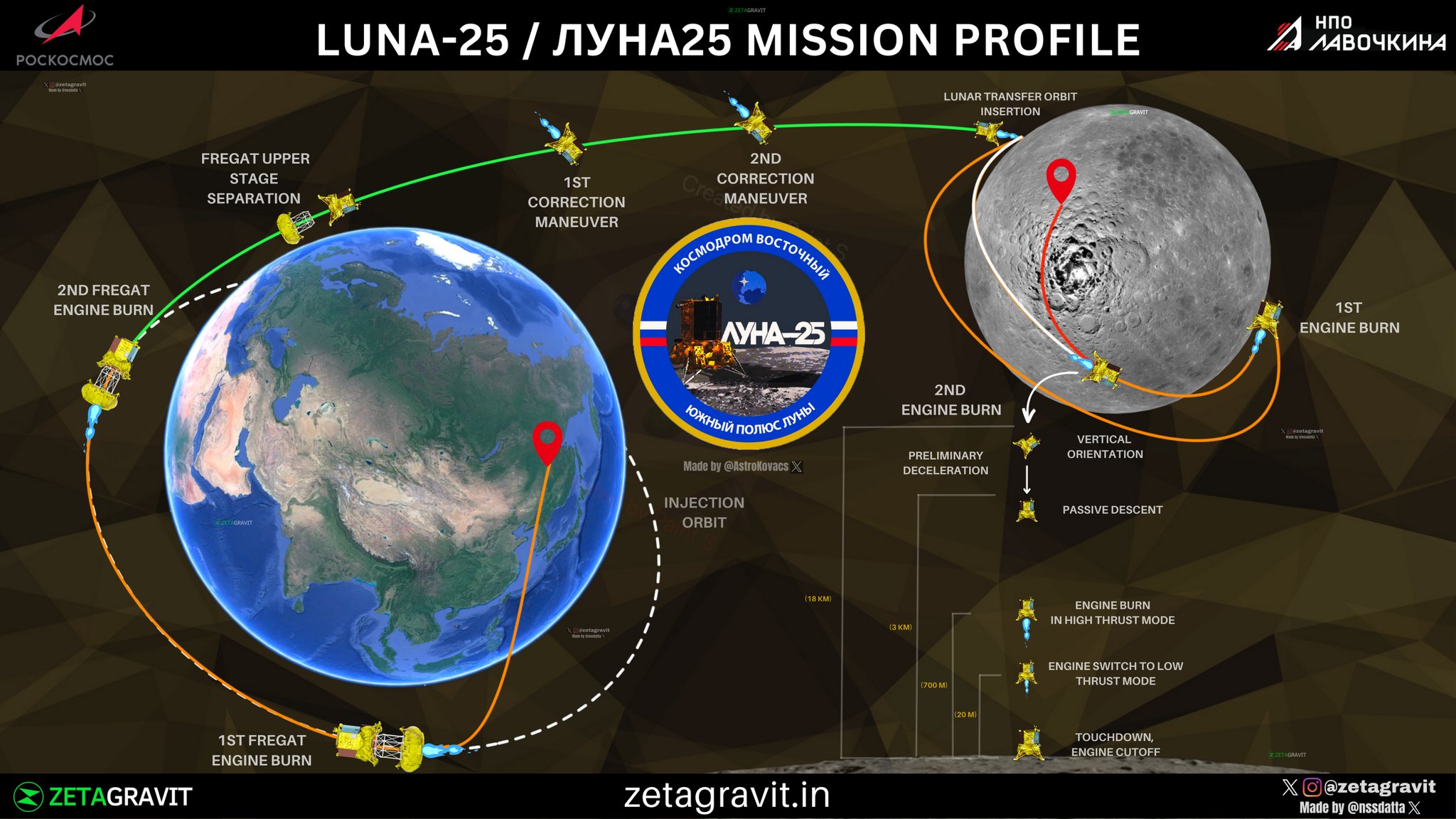
Pour se rendre sur la Lune, Luna-25 a chois la route rapide : il faudra entre 4,5 et 5,5 jours pour rejoindre l’orbite lunaire. Puis après le freinage, Luna-25 entrera dans une orbite circulaire presque polaire à une altitude de 100 km pendant 3 jours et 36 orbites. Des mesures de trajectoire minutieuses seront effectuées pour former une orbite pré-atterrissage amenant Luna-25 au 4e jour en orbite lunaire à 18 km d’altitude au périlune. La mission y restera environ 2 jours et 24 orbites. Puis l’atterrissage sera déclenché. La suite dans d’autres articles !
Luna-25 a correctement décollé ce 10 août à 23h10’57 » UTC à bord d’une Soyouz 2.1b depuis la Cosmodrome de Vostochny.

Si tout va bien, l’insertion en orbite lunaire est prévue le 16 août et l’atterrissage le 21 août !
Pour compléter :
Sources principales : site Lavochkin et TASS
Image de couverture : crédit Lavochkin

En savoir plus sur Rêves d'Espace
Subscribe to get the latest posts sent to your email.
« aurait dû s’appeler Luna-45 si les Soviétiques n’avaient pas dissimulés les 21 échecs depuis Luna-1, marque la dernière mission soviétique lunaire avec une 3e mission de retour d’échantillons en août 1976. »
Est-il possible d’avoir le détail et les dates des ces échecs dont ne n’ai jamais entendu parler ?
Par avance merci de vos précisions.
Cordialement
Vous pouvez retrouver l’ensemble des lancements vers la Lune sur le site de Nicolas Pillet et l’absence de numérotations sur les échecs : https://www.kosmonavtika.com/satellites/lune/sondes/sondes.html
L’échec (pour une fois non dissimulé) de Luna-25 est donc le 22e échec d’une sonde lunaire soviétique ou russe sur 46 lancements.