

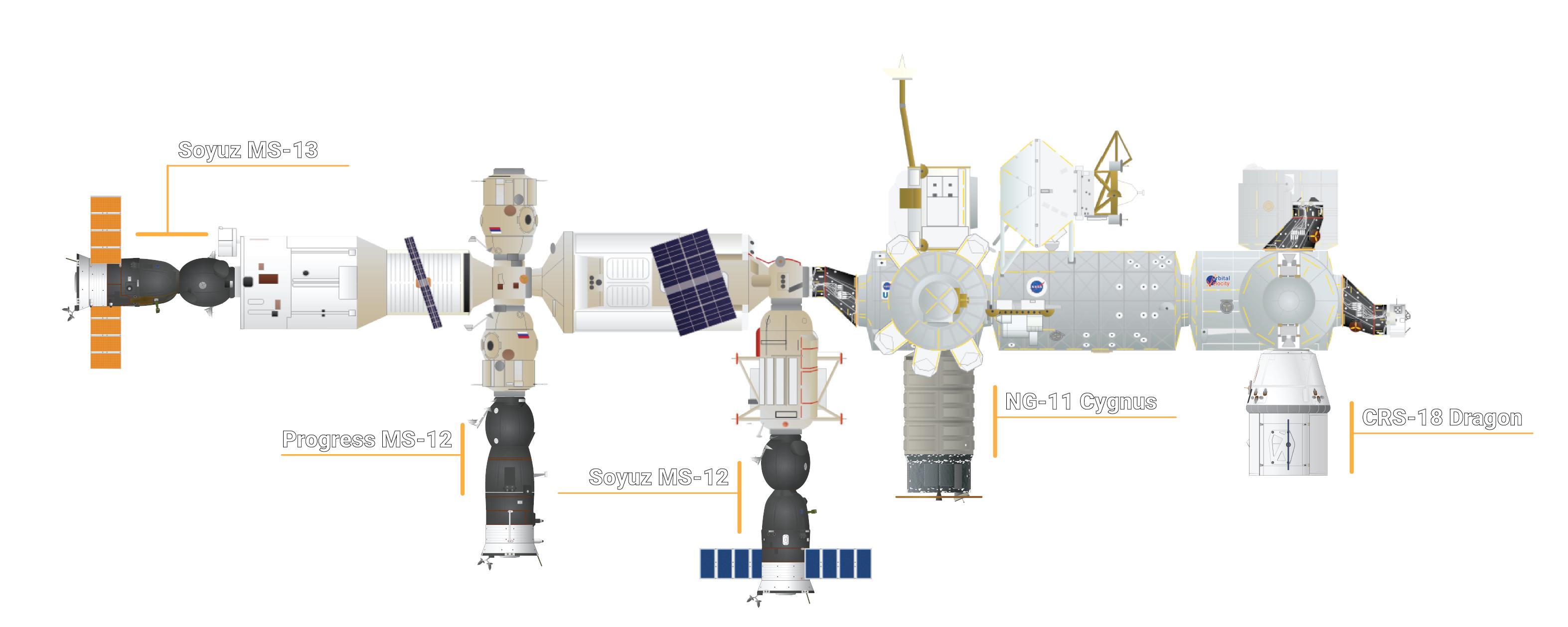
ISS : Soyouz MS-14 amarré, un nouveau robot à bord
Après un premier amarrage raté le 24 août, le vaisseau Soyouz MS-14 est finalement arrivé à destination le mardi 27 août.
Le Soyouz MS-13 a laissé la place
L’échec de l’amarrage automatique du vaisseau étant dû à un équipement défaillant côté ISS sur le module Poïsk, Roscosmos avait décidé de déplacer le vaisseau Soyouz MS-13 pilotable manuellement du module Zvezda au module Poïsk pour laisser la place libre pour le Soyouz MS-14 qui ne pouvait s’amarrer qu’en mode automatique car sans équipage à bord [(re) lire ISS : échec de l’amarrage du Soyouz MS-14].
Lundi 26 août, les 3 membres d’équipage arrivés avec le Soyouz MS-13, Alexander Skvortsov , Luca Parmitano et Andrew Morgan, ont pris place à bord du vaisseau en combinaison spatiale, prêts à rentrer sur Terre en cas d’incident.
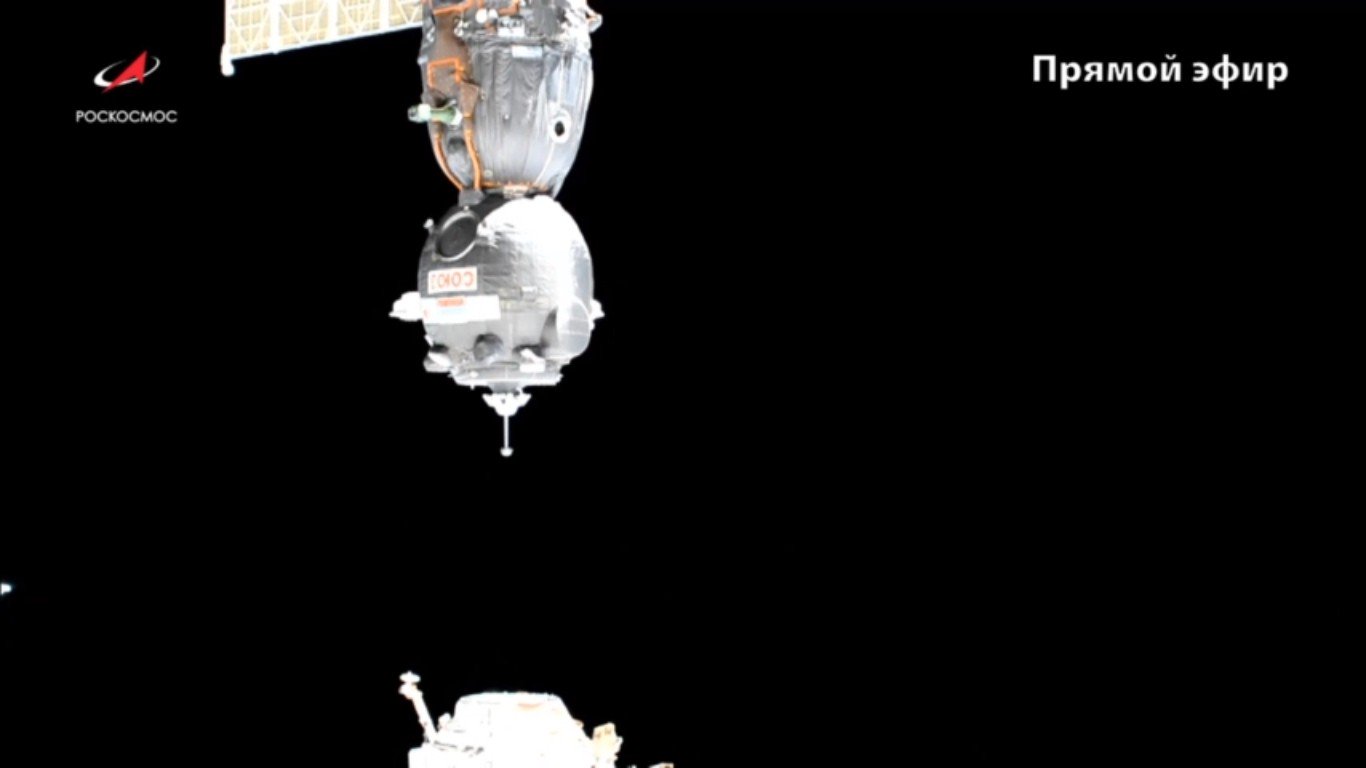
À 5h35, heure de Paris, le Soyouz MS-13 s’est séparé de la Station Spatiale Internationale.

Après s’être éloigné momentanément, le vaisseau, piloté en manuel par son commandant, Alexander Skvortsov, s’est amarré avec succès au module Poïsk à 5h59, heure de Paris.
Amarrage réussi pour Soyouz MS-14

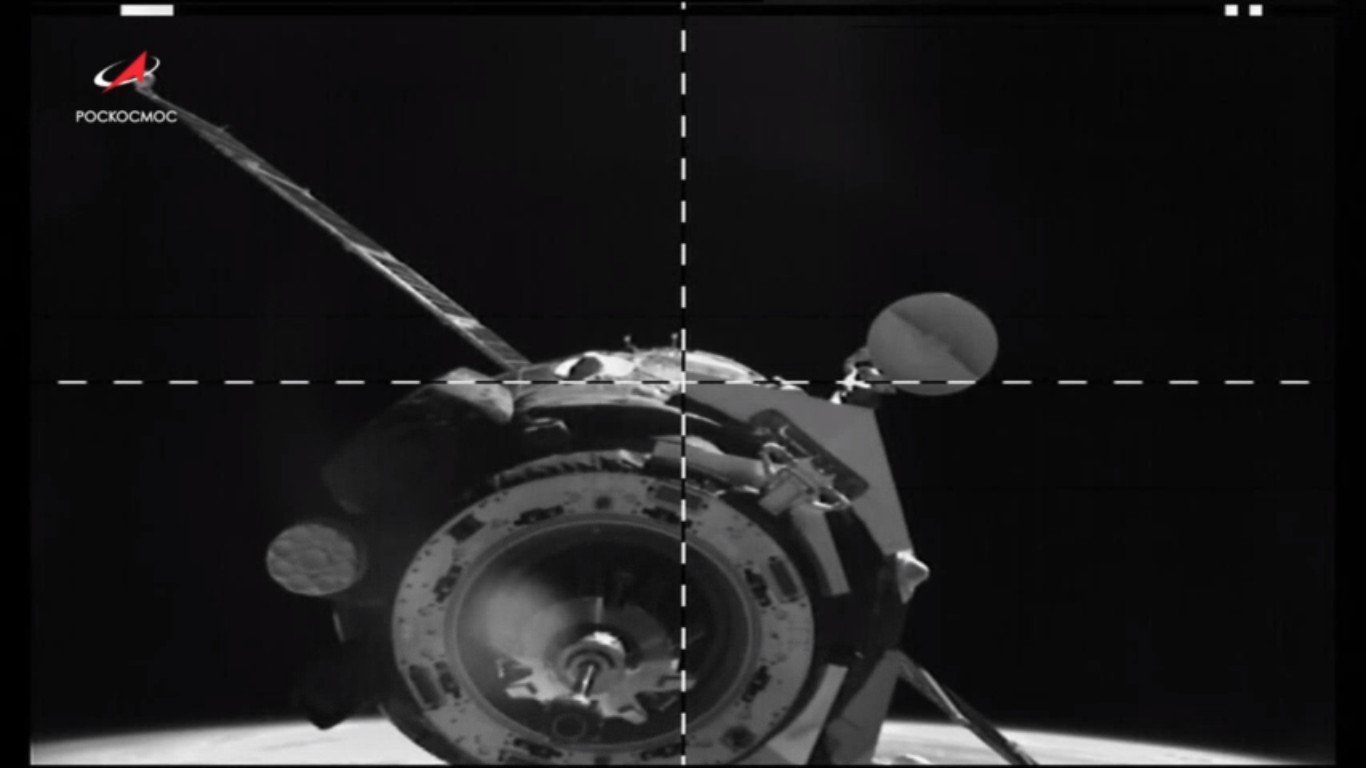
Le 27 août à 5h08, heure de Paris, le Soyouz MS-14 s’est cette fois-ci amarré sans problème en mode automatique au nœud d’amarrage du module Zvezda du segment russe de l’ISS.

Si le planning initial est maintenu, malgré 3 jours de retard sur l’amarrage, le vaisseau Soyouz MS-14, avec Skybot F-850, sera désamarré du module Zvezda à 18h13 UTC le 6 septembre. L’atterrissage dans les plaines du Kazakhstan est prévu à 21h35 GMT.

Premier vaisseau russe sans équipage depuis 33 ans
Le vaisseau Soyouz MS-14 amène 657 kg de matériel pour des expériences scientifiques, du matériel médical, des conteneurs avec des rations de nourriture, des colis pour l’équipage, ainsi que le robot anthropomorphe Skybot F-850.

Skybot F-850 était assis dans le siège central du vaisseau spatial Soyouz MS-14 lors du lancement, la place habituelle du commandant de bord, tenant un drapeau russe dans une main.
Le robot n’a fait aucune opération à bord du Soyouz MS-14 mais des capteurs situés sur son corps ont mesuré les paramètres clés du vol tels que l’accélération, les vibrations, la température et l’humidité.
FEDOR l’autre nom du robot, est l’abréviation de Final Experimental Demonstration Object Research (Recherche finale sur les objets de démonstration expérimentale). Il a son propre compte Twitter, @FEDOR37516789, et son compte Instagram : SkybotF850.
Objectif de FEDOR : aider l’équipage dans des opérations dangereuses
FEDOR mesure 1,80 mètre de haut et pèse environ 160 kilos au décollage. L’alimentation électrique du robot est assurée par un ensemble de batteries standard qui équipent les combinaisons spatiales de la série Orlan.

Skybot F-850 a un programme prédéfini avec des éléments d’intelligence artificielle. Le maintien de l’équilibre, la décomposition des mouvements généraux en différentes fonctions locomotrices et l’assistance experte de l’équipage permettent au robot de s’exercer de manière indépendante. De plus, le robot peut travailler en mode avatar, c’est-à-dire sous le contrôle total d’un opérateur.
Le robot anthropomorphe Skybot F-850 peut communiquer sur n’importe quel sujet lancé par son interlocuteur, selon Alexander Bloshenko, conseiller scientifique à Roscosmos.
Il est prévu que Skybot F-850 reproduise les mouvements du cosmonaute Aleksei Skvortsov au cours d’une série de tests. Si les tests réussissent, la Russie pourrait lancer des robots améliorés pouvant fonctionner en dehors de la Station Spatiale, aidant les équipages lors des sorties spatiales dans l’espace, ou permettant aux cosmonautes d’éviter complètement les sorties dans l’espace
Afin d’éviter que des mouvements imprudents du robot endommagent les systèmes dans l’ISS, divers algorithmes de protection sont utilisés au niveau du système de contrôle.
Fedor doit rentrer sur Terre avec le Soyouz MS-14. En fonction des données récoltées pendant cette mission, il est éventuellement prévu de faire revoler le robot ou une évolution du robot et même d’y faire faire une sortie spatiale.
Skybot F-850 n’est pas le premier robot humanoïde à se rendre dans l’ISS
FEDOR n’est pas le premier robot à rejoindre l’ISS.
En février 2011, amené par une Navette Spatiale, le robot humanoïde Robonaut de la NASA a commencé une mission de test de plusieurs années mais a connu à partir de 2014 des problèmes divers.

Robonaut est revenu sur Terre en mai 2018 avec le cargo Dragon CRS-14 pour être réparé. Il pourrait revenir sur l’ISS fin 2019 ou en 2020.
En août 2013, les Japonais ont lancé eux aussi leur robot : KIROBO. De taille plus modeste, il avait surtout pour objectif d’interagir avec les astronautes japonais (il ne parlait que japonais).

En février 2015, KIROBO a quitté la Station Spatiale Internationale et est retourné sans encombre sur Terre.
Pour en savoir plus sur ces robots : Robonaut et Kirobo : les Robots de l’ISS
Source principale de l’article : www.roscosmos.ru
En savoir plus sur Rêves d'Espace
Subscribe to get the latest posts sent to your email.
NB : Pryamoy Efir = En direct depuis l’espace (l’éther).
Premier vaisseau russe sans équipage depuis 33 ans
NB : les précédents furent (en plus de nombreux « Voskhod » ou « Soyouz » camouflés sous le terme passe-partout de « Kosmos »), les Soyouz-2, 20, 34 (suite à l’échec de Soyouz-33), T (ou T-1), TM (ou TM-1). Les prototypes de « Vostok » n’étaient pas camouflés en tant que « Kosmos » mais en tant que « Sputnik » (ou « Korabl-Sputnik »).
Soyouz TM-1 avait été lancé le 21 mai 1986.
suite
Il est à noter que FEDOR (ou Fyodor) n’est qu’à moitié russe. Il est composé d’environ 15 000 pièces dont la moitié (pour la plupart électroniques) ont été produites en Russie, les autres provenant notamment du Japon, d’Allemagne, de Suisse et des Etats-Unis.
Cela prouve bien une fois de plus, si besoin était, qu’aucun pays n’est vraiment indépendant.
FEDOR devrait revoler dans l’espace en 2022, cette fois à bord du nouveau vaisseau spatial russe Federatsiya dont le premier exemplaire devrait être baptisé Orel (ou Oryol), ce qui était l’indicatif (callsign, pozyvnye) de German S. Titov (Vostok-2) en 1961 et ce qui était aussi le nom du premier navire de guerre russe (construit entre 1667 et 1669, sous le règne du tsar Alexis).
(source : Air&Cosmos n° 2563 du 30 août 2019)