

Hakuto-R, une mission lunaire japonaise privée
L’entreprise privée japonaise ispace vient de faire décoller son atterrisseur lunaire Hakuto-R ce 11 décembre à bord d’une Falcon 9. Un nouveau projet lunaire ambitieux en plusieurs parties et qui confirme la place de plus en plus prépondérante du secteur commercial dans l’exploration spatiale de notre satellite dans les années à venir. Si la mission est un succès, le Japon pourrait devenir le quatrième pays à atterrir sur la Lune après les échecs de l’Inde ou d’Israël en 2019.
L’héritage du Google Lunar X-Prize
Hakuto signifie le lapin blanc en japonais. Dans le folklore légendaire au Japon, on dit qu’un lapin blanc vit sur la Lune.
Comme pour l’atterrisseur Beresheet de l’israélien SpaceIl, l’aventure d’Hakuto-R commence avec le concours Google Lunar X-Prize qui devait envoyer un atterrisseur lunaire privé sur la Lune d’ici fin 2018. Le projet Hakuto d’un petit rover lunaire est l’un des 5 finalistes avant que le concours ne soit annulé en mars 2018.
Le projet est redémarré 6 mois plus tard et s’appelle désormais Hakuto-R avec le R pour Reboot (redémarrage) avec un changement de logo.
Ispace est une entreprise japonaise d’environ 200 personnes implantée également au Luxembourg et aux Etats-Unis. Son activité est centrée sur le développement d’un service de transport à haute fréquence vers et depuis la surface lunaire, pour « construire un monde durable qui utilise les ressources spatiales et fait de la Terre et de la Lune un écosystème unique« .
En 2018, ispace a rejoint une équipe dirigée par Draper qui a été sélectionnée par la NASA pour participer à son programme de services de charge utile lunaire commerciale (CLPS* – Commercial Lunar Payload Services). En 2019, ispace Europe a été sélectionnée par l’ESA pour faire partie de l’équipe scientifique de PROSPECT (Package for Resource Observation and in-Situ Prospecting for Exploration, Commercial exploitation and Transportation), un programme qui cherche à extraire l’eau sur la Lune, mais qui doit être à l’arrêt car la première mission devait décoller à bord de l’atterrisseur russe Luna 27. [*Article dédié à venir]
Ispace a également répondu à l’appel d’offres de la NASA pour des missions de collectes d’échantillons sur le sol lunaire dans le cadre du programme Artemis.
De la même manière que les bateaux, les trains, les voitures et les avions ont permis des sauts géants dans l’exploration et les progrès de la civilisation, l’atterrisseur lunaire commercial est le prochain moyen de transport qui propulsera le développement humain.
Takeshi Hakamada, fondateur et PDG d’ispace
Ispace est associée avec plusieurs entreprises privées pour la mission Hakuto-R dont la compagnie aérienne Japan Airlines et Suzuki [liste des partenaires].
Une première mission privée japonaise
L’atterrisseur HAKUTO-R mesure un peu moins de 2,3 m de haut et 2,6 m de largeur, et il pèse environ 340 kg à vide. Ses 4 réservoirs de propergols à hydrazine (MMH) et au tétroxyde d’azote (NTO) pour alimenter les moteurs de l’atterrisseur font passer l’atterrisseur à environ 1 tonne au décollage.

ArianeGroup fournit les deux systèmes de propulsion indépendants : le système de propulsion principal (équipé d’un moteur apogée et de propulseurs bi-propulseurs) et un système de contrôle de réaction (RCS) composé de propulseurs Hydrazine. Les deux systèmes de propulsion sont équipés de composants ArianeGroup tels que des vannes, des tuyaux et des raccords.
L’entreprise américaine Draper, fournisseur historique des logiciels de navigation des missions Apollo avec le MIT Instrumentation Laboratory, a fourni les logiciels de guidage, de navigation et de contrôle pour l’atterrissage. Les panneaux solaires ont été fournis par Sierra Space.

Après le décollage, Hakuto-R sera placé sur une trajectoire de cinq mois aboutissant à une tentative d’atterrissage lunaire fin avril 2023. Il s’agit d’une trajectoire similaire à celles de CAPSTONE de la NASA ou de l’orbiteur lunaire coréen Danuri qui permet de consommer peu de carburant pour les corrections de trajectoire.

L’atterrissage est prévu dans l’hémisphère nord de la face visible de la Lune au niveau du cratère Atlas (47.5° N, 44.4° E) à Mare Frigoris dans l’hémisphère nord. D’autres zones de secours ont été définies également.

Si l’atterrissage est réussi, l’atterrisseur est conçu pour fonctionner pendant environ 10 jours sur le sol lunaire.
Plusieurs charges utiles à bord
Hakuto-R embarque une trentaine de kilogrammes de charges utiles dont la principale est le rover Rashid.
Le rover émirati Rashid
Rashid est un petit rover développé par le MBRSC (Mohammed Bin Rashid Space Centre) et l’agence spatiale émirati EUSA.
Rashid totalise une masse de 10 kg et mesure environ 0,5 mx 0,5 m sur 0,5 m de haut en configuration pliée. Sur son « toit », un mât déployable est installé qui élève la caméra principale CASPEX du rover à une hauteur d’un peu moins de 70 cm au-dessus du sol, offrant ainsi une visibilité à 360°.
La mobilité du rover est assurée au moyen de quatre roues avec engrenages différentiels.
Le petit rover à énergie solaire transporte une variété de caméras, un imageur microscopique, ainsi qu’une sonde Langmuir, qui pourraient aider les chercheurs à mieux caractériser et comprendre l’environnement de la surface lunaire chargé électriquement.
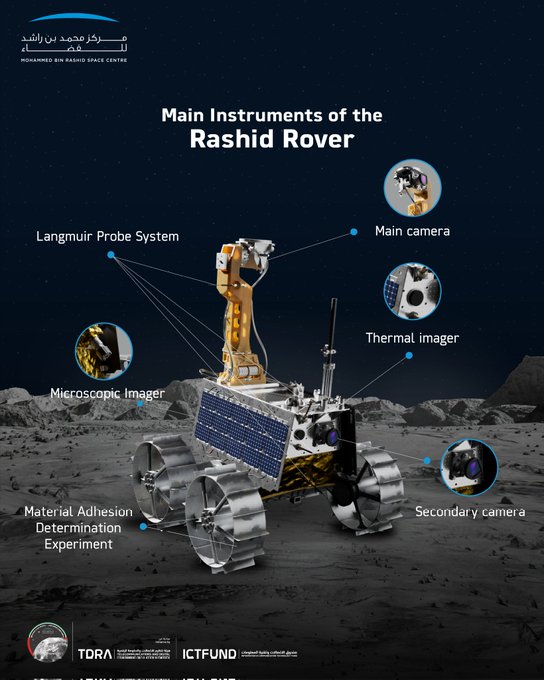
Une deuxième caméra de champ large est fixée à l’arrière du rover. Cette caméra devrait offrir une vue plus étroite des traces du rover imprimées dans le sol lunaire.
L’imageur microscopique, designé par le MBRSC, CAM-M est un imageur optique qui obtiendra des images haute résolution de la surface lunaire. Elle est montée statiquement à l’avant du rover, pointant légèrement en avant du corps principal. Elle devrait permettre de voir au fur et à mesure qu’on se déplace comment varie la taille des grains du régolithe lunaire.
La caméra thermique servira à mesurer la température sur la surface lunaire et son évolution au cours d’un jour lunaire.
Quatre sondes de Langmuir m-NLP de l’Université d’Oslo (Suède) sont montées à différentes hauteurs sur le corps du rover, traçant ainsi les densités d’électrons entre environ 15 cm et 65 cm au-dessus du sol. Rashid pourrait ainsi être en mesure de réaliser une cartographie 3D des densités d’électrons dans la zone d’atterrissage.
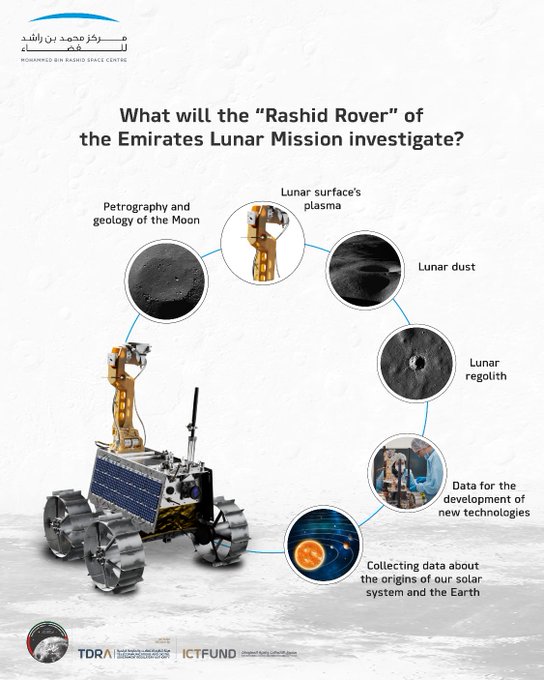
Rashid mènera une expérience pour tester in situ différents matériaux pour leurs propriétés adhésives et d’abrasion au régolithe lunaire. Pour ce faire, différents échantillons de matériaux seront montés sur la circonférence extérieure d’une roue. La collecte des poussières sur ces échantillons sera surveillée au moyen de la caméra principale montée sur mât.
Rashid devrait fonctionner sur la Lune pendant une seule journée lunaire (environ 14 jours terrestres).

Le mini rover Sora-Q et autres technologies
Un petit rover transformable développé par l’agence spatiale japonaise JAXA et la société japonaise de jouets Tomy est également à bord d’Hakuto-R.
Il ne pèse que 250 grammes et mesure environ 80 millimètres de large avant qu’il ne déploie de minuscules roues.

Le rover a pour mission de rouler sur la surface lunaire et collecter des données et des images pour aider à la conception d’un futur rover pressurisé pour transporter des astronautes sur la Lune. Il permettra d’évaluer l’impact du régolithe sur les performances de roulage.
Une charge utile de l’entreprise NGK Spark Plug testera les performances des batteries à semi-conducteurs. Les batteries lithium-ion actuelles sont constituées d’électrolytes liquides, qui ne conviennent pas aux températures lunaires. La technologie de batterie à semi-conducteurs utilise un matériau solide comme électrolyte, une céramique, et évite le problème du liquide qui gèle et peut être utilisée à des températures entre -30℃ et +105℃ [source].

Trois charges utiles canadiennes sont à bord du lander :
- Des caméras grand angle de Canadensys qui documentera le déploiement du rover Rashid.

- Un ordinateur de vol équipé d’intelligence artificielle de l’entreprise canadienne Mission Control Space Services (MCSS). Avec l’application MoonNet, cela permettra de classer les types de caractéristiques géologiques lunaires visibles dans les images de Rashid.
- Une démonstration du système de navigation autonome basé sur le cratère de NGC Aerospace.
Et Hakuto-R embarque aussi un disque musical contenant la chanson « SORATO » du groupe de rock japonais Sakanaction qui devait être embarquée sur le rover du Lunar Google X-prize.

Un assemblage et des tests en Europe
L’assemblage de l’atterrisseur débuta au Japon en 2021 dans une installation de la JAL Engineering Co., Ltd. à Narita.
Les activités d’assemblage, d’intégration et de test (AIT) pour l’atterrisseur ont été menées dans les installations d’ArianeGroup de Lampoldhausen, en Allemagne.

Les activités d’AIT ont été achevées en mai 2022 et elles ont été suivies des essais d’environnement chez IABG GmbH.
Après assemblage et tests finaux en Allemagne, l’atterrisseur est arrivé le 31 octobre à Cap Canaveral aux États-Unis pour la phase finale de sa préparation au lancement.
La France impliquée aussi
Trois caméras CASPEX (CAmera for SPace EXploration) situées à l’avant et à l’arrière du rover Rashid et en haut du mât vont fournir des images en très haute résolution (2000×2000 pixels) de l’environnement lunaire pour sélectionner les trajectoires du rover et aider aux analyses géologiques du sol.
Ces caméras ont été sélectionnées car elles sont de taille réduite (3,5 x 3,5 x 2,5 cm pour 64 grammes), ont une faible consommation d’énergie, et un coût réduit. Elles sont certifiées pour différentes utilisations spatiales. Elles sont déjà à bord de plusieurs missions comme Perseverance (instrument Supercam), le cubesat EyeSat ou les satellites OneWeb (pour les senseurs stellaires).
Le MBRSC s’est associé au Centre de recherche pétrographique et géochimique de l’Université de Lorraine à Nancy (CRGP-CNRS) pour la sélection des sites d’atterrissage et l’analyse des données de l’imageur microscopique du rover.
Une seconde mission pour 2024
Ispace prévoit également une seconde mission lunaire en 2024 avec le déploiement de son propre rover pour l’exploration de la surface et la collecte de données. Le rover est directement dérivé de celui du concours Google Lunar X-Prize développé par le Space Robotics Lab de l’Université Tohoku.
Ispace annonce que son rover léger, équipé de quatre roues, pourra aisément traverser un terrain difficile, aura des capacités vidéo et photo en haute définition à 360°, la capacité de réaliser une cartographie détaillée du terrain, et celle de transporter les charges utiles des clients à la surface lunaire.

L’entreprise prévoit même d’autres missions avec des fréquences élevées avec des évolutions de son atterrisseur.
On n’a pas fini de parler de la Lune !