

Un pas de plus pour le vol habité indien Gaganyaan avec TV-D1
Le 21 octobre, l’agence spatiale indienne, l’ISRO a réalisé un test d’abandon en haute altitude de la capsule d’équipage de son programme habité Gaganyaan.
L’objectif de cet essai TD-V1 (pour Test Vehicle for CES abort Demonstration) était de tester le système d’évacuation de l’équipage (CES, Crew Escape System) comprenant différents systèmes de séparation, la décélération du module d’équipage (CM, Crew Module) et son retour vers la Terre sous parachutes et son amerrissage.
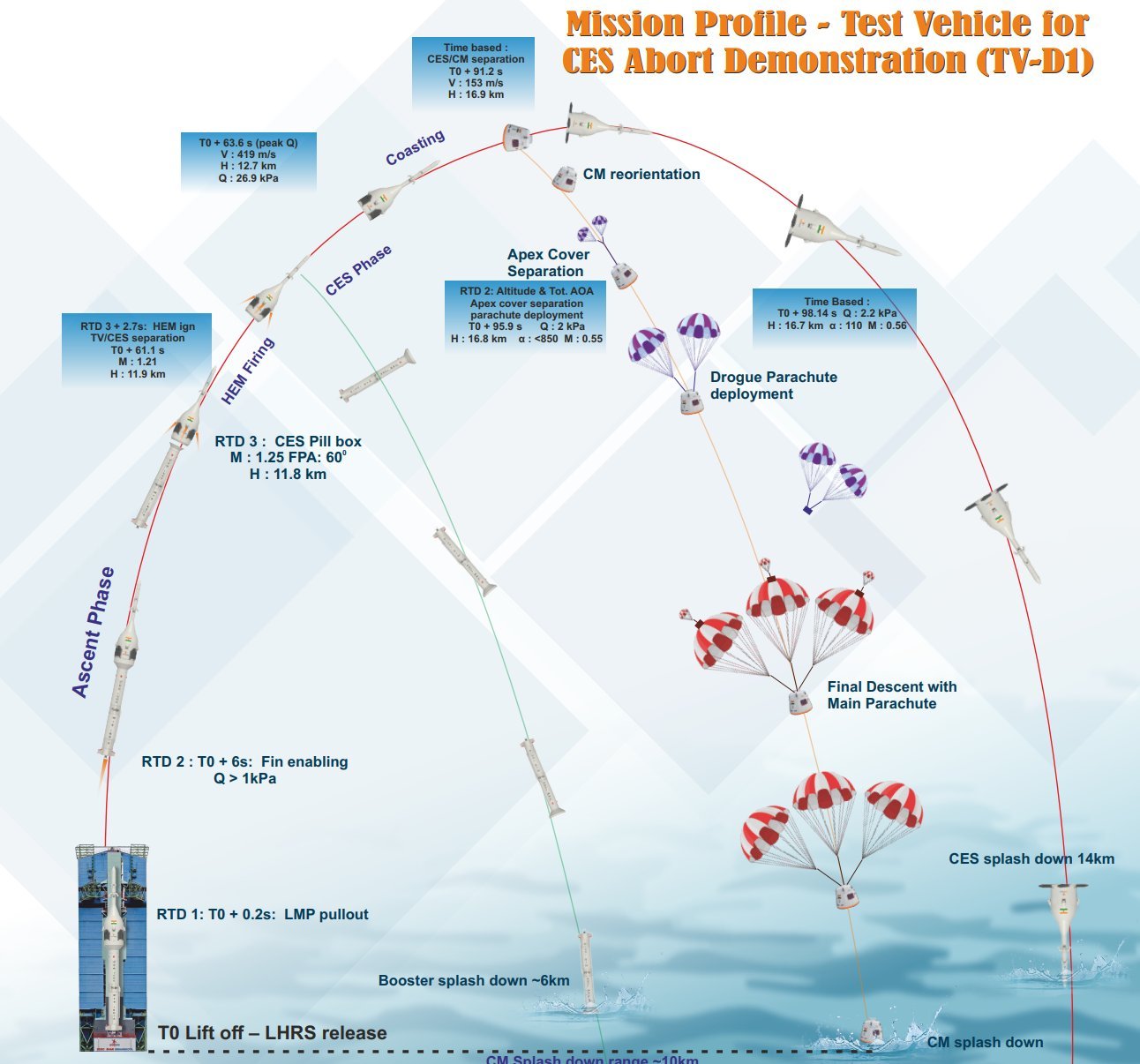
La capsule non habitée et non pressurisée devait atteindre au moins 17 kilomètres et Mach 1,2, se séparer du lanceur et donc démontrer que tous les systèmes impliqués permettraient une évacuation en urgence des astronautes en cas d’anomalie lanceur lors d’un réel vol habité.

Ce type de système existe sur les Soyouz, les Crew Dragon et le Starliner et aussi le vaisseau Orion pour le SLS. Ce système d’abandon en vol a notamment été mis en route lors de l’échec du vol Soyouz MS-10 en octobre 2018. L’Inde avait déjà testé ce système en juillet 2018.
Un test réussi
Après plusieurs reports dans la chronologie finale, le booster dérivé de ceux qui équipent le lanceur GSLV-Mk2 a décollé 2 heures après l’heure prévue, à 4h30 UTC.
La capsule d’une masse de 4 520 kg, s’est séparée du lanceur comme prévu, 61 secondes après le décollage. La séparation devait s’effectuer à Mach 0,5 (non confirmé).
Le système Crew Escape comprend 5 types de moteurs solides à action rapide, à savoir le moteur de largage du système d’évacuation de l’équipage (CJM, Crew Escape System Jettisoning Motor), le moteur d’évacuation à haute altitude (HEM, High-altitude Escape Motor), le moteur d’évacuation à basse altitude (LEM, Low-altitude Pitch Motor), le moteur de tangage à basse altitude (LPM, Low-altitude Pitch Motor) et le moteur de tangage à haute altitude (HPM, High-altitude Pitch Motor), qui génère l’accélération requise pour diverses exigences de la mission.


Après un vol balistique, le module d’équipage est rentré sur Terre. Les parachutes se sont déployés comme prévu, à commencer par le parachute pilote à une altitude d’environ 16,7 km, puis les parachutes principaux, de 25 mètres de diamètre, à environ 2,5 km.
Le module d’équipage a atterri ensuite dans l’océan (vitesse attendue de 8,5 m/s). Il semble toutefois que le module se soit mis la « tête en bas » et donc que l’amerrissage ne soit pas tout à fait comme attendu.

La capsule a été récupérée ensuite par la Marine indienne.

A revoir en live :
Source principale : ISRO

En savoir plus sur Rêves d'Espace
Subscribe to get the latest posts sent to your email.
Ping : Les News du New Space: à l’heure de l’Inde – Spacekiwi