SLIM s’est bien posé sur la Lune mais à l’envers, image à l’appui !
La mission Smart Lander for Investigating Moon (SLIM) s’est bien posée sur la Lune le 19 janvier et l’agence spatiale japonaise a présenté les images et l’analyse des données de cet exploit le 25 janvier.

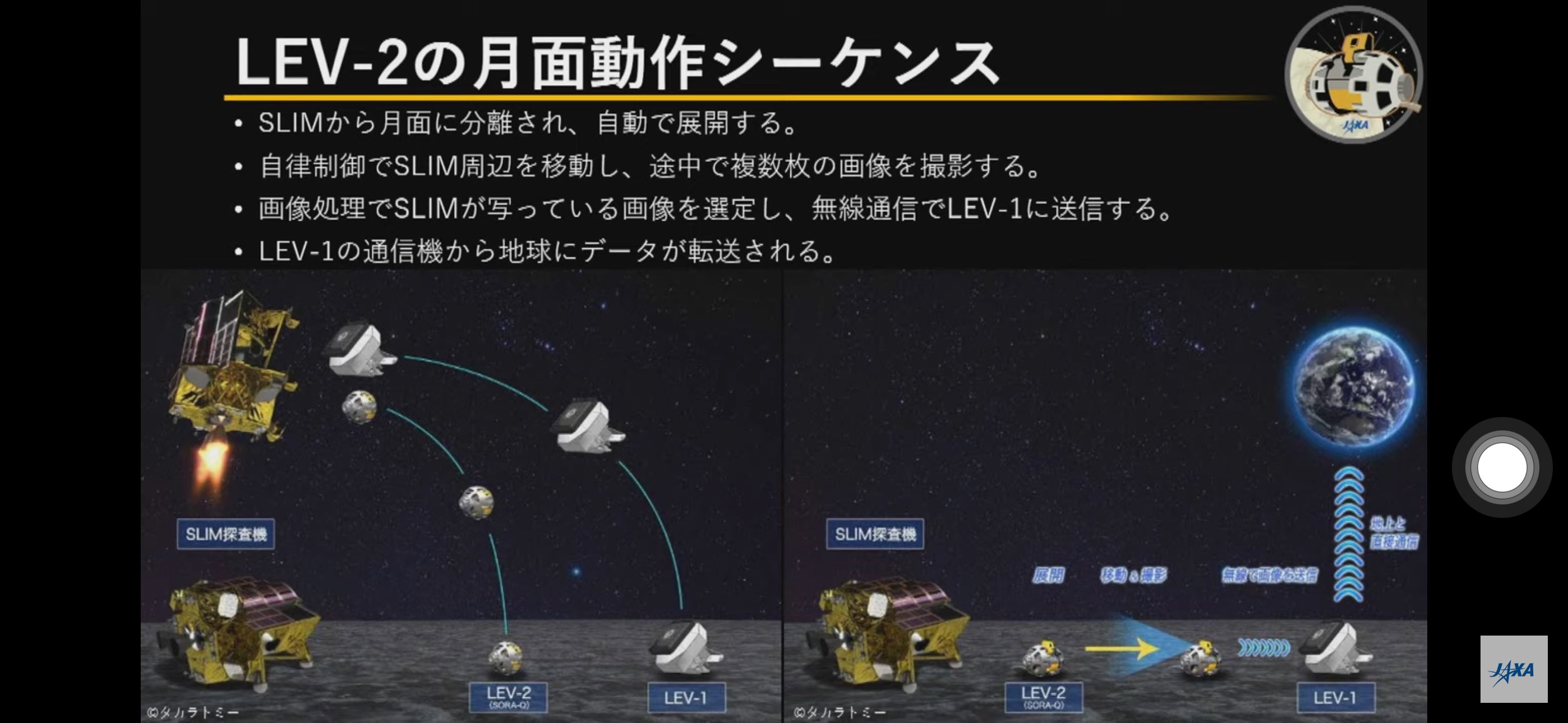
Cette image a été prise par l’engin LEV-2, ou SORA-Q (250 grammes !), qui avait été séparé de l’atterrisseur juste avant l’alunissage. L’image a transité à travers LEV-1 vers la Terre. Selon les données de télémétries recueillies par la JAXA, après le déploiement de SLIM, LEV-1 a exécuté des mouvements de saut comme prévu et une communication directe avec les stations terrestres. LEV-1 et LEV-2 sont devenus les premiers robots d’exploration lunaire du Japon.
La JAXA a donc bien communiqué avec le lander après l’atterrissage et a récolté de nombreuses données pour analyser ce qu’il s’est passé, à commencer par les images des caméras de navigation qui ont renvoyé des images de la phase d’atterrissage :
La JAXA confirme que le lander ne s’est pas posé dans la bonne attitude, empêchant la production d’électricité par son panneau solaire, se trouvant du coup mal orienté vis à vis du Soleil (pas vers le haut). L’équipe de la mission avait envoyé une télécommande environ 2h30 après l’alunissage pour déconnecter la batterie afin d’éviter une décharge totale et espérer une recharge lorsque le Soleil serait plus dans l’axe du panneau solaire.
La caméra spectroscopique multibande (MBC) à bord de SLIM a été utilisée et a pris des images jusqu’à ce que l’alimentation soit coupée. Si la caméra pouvait être remise en route, il pourrait y avoir des images à d’autres longueurs d’onde.



Les données techniques acquises ont révélé qu’à une altitude de 50 m juste avant le début de la manœuvre d’évitement d’obstacles, la poussée de l’un des deux moteurs principaux a probablement été perdue. Le logiciel embarqué de SLIM a identifié de manière autonome l’anomalie, et tout en contrôlant la position horizontale autant que possible, SLIM a poursuivi la descente avec le second moteur et s’est déplacé progressivement vers l’est. La vitesse de descente au moment du contact avec le sol était d’environ 1,4 m/s ou moins, ce qui était inférieur au critère de design, mais le lander se déplaçait trop rapidement sur le côté et donc cela l’a déséquilibré.

Deux images de caméra de navigation qui ont été prises à peu près au moment où la poussée du moteur principal soit devenue anormale montrent des points brillants qui n’étaient pas là sur la première. L’un d’eux est une forme de tuyère qui pourrait indiquer que la tuyère du moteur se soit cassée. La cause de la perte du moteur principal est encore à l’étude.

SLIM s’est posé à environ 55 m à l’est du site cible pour l’atterrissage. La précision de la position avant le début de la manœuvre d’évitement d’obstacles (à environ 50 m d’altitude) a été évaluée à environ 10 m ou moins, peut-être environ 3 à 4 m, selon le communiqué de la JAXA. La démonstration technologique d’un atterrissage ponctuel avec une précision de 100 m, la mission principale de SLIM, est donc un succès.

Source principale : JAXA
Photo de couverture : Image JAXA retravaillée par Thomas Appéré (redressée, remplacé les données manquantes et très léger ajustement la balance des couleurs)