
SLIM, une nouvelle mission lunaire japonaise
Après Hakuto-R au printemps, une autre mission lunaire japonaise doit tenter d’atterrir sur la Lune en 2023 : SLIM.
SLIM, Smart Lander for Investigating Moon, est une mission de l’agence spatiale japonaise, la JAXA, qui doit servir de démonstrateur d’un atterrisseur léger pour la Lune mais aussi l’exploration du Système Solaire.

Un atterrisseur léger avec une grande précision d’atterrissage
SLIM est conçu dans l’optique d’avoir une réduction de la taille et du poids de l’équipement utilisé pour les alunissages et il effectuera des recherches sur les origines de la Lune.
Il testera également les technologies indispensables pour l’exploration dans des environnements à faible gravité, que ce soit la Lune ou d’autres corps du Système Solaire. La JAXA a développé un système de navigation précis pour cet objectif.
L’objectif de précision d’atterrissage est de 100 m alors que les autres atterrisseurs ont généralement une précision de plusieurs kilomètres et donc choisissent de larges endroits plats, souvent des « Mers ». Le projet SLIM envisage des méthodes d’atterrissage idéales pour l’atterrissage sur des terrains en pente.
La navigation s’effectue grâce à un traitement de l’image de la surface lunaire prise par la caméra de navigation haute résolution et en la comparant avec la carte embarquée du cratère lunaire cible pour connaître avec précision la position de l’engin spatial en peu de temps. La carte provient notamment des observations de la mission japonaise KAGUYA (ou SELENE) qui a orbité autour de la Lune entre 2007 et 2009.
La JAXA a même indiqué que SLIM était une mission pour avoir « la possibilité d’atterrir où nous voulons et pas seulement là où il est facile d’atterrir« , d’où le surnom de Moon Snipper.
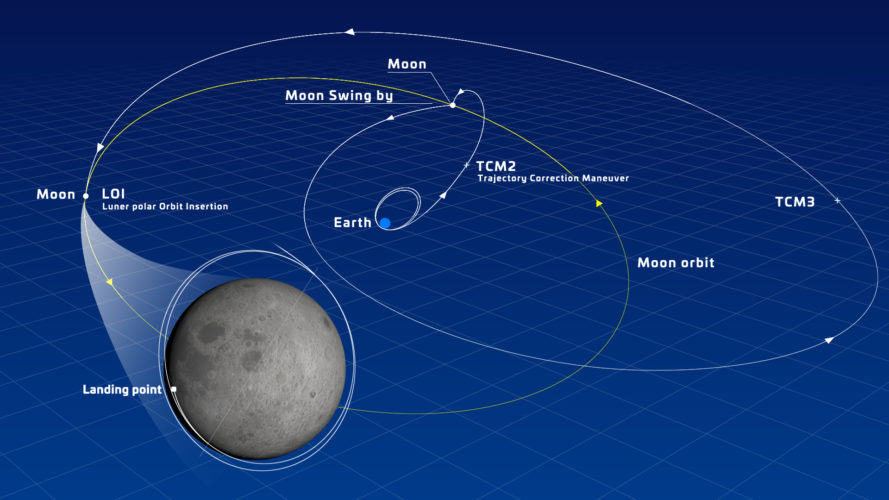
L’atterrissage est prévu en 2 étapes : reconnaissance des cratères depuis l’orbite lunaire et mesure de sa position en temps réel, puis après avoir pris la décision de l’endroit optimal pour atterrir verticalement, ce sera la phase d’alunissage automatique. SLIM adaptera à sa discrétion son altitude lors de la première phase.
SLIM ira initialement sur une orbite lunaire à 600 x 15 km d’altitude, suivi d’une phase de descente motorisée pour le ramener à 3,5 km d’altitude. À environ 3 mètres d’altitude, les moteurs sont coupés et l’atterrisseur tombe sur la surface.

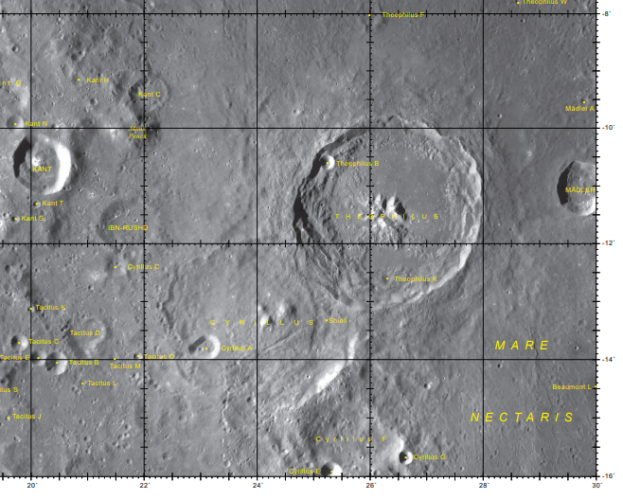
La zone ciblée est le cratère d’impact Shioli (prénom féminin japonais) situé à 13,322 S, 25,232 E, dans un cratère plus large, Cyrillus.
SLIM est petit : 2,4 m de haut sur 2,7 m de large sur 1,7 m de profondeur. Il pèse à vide 190 kg. Au décollage, il pèse entre 700 à 730 kg et ne pèsera plus qu’environ 210 kg à l’alunissage.

SLIM a une forme légèrement inhabituelle en raison de sa méthode d’atterrissage, optimisée pour l’alunissage dans des zones difficiles d’accès.
Le corps du lander est construit autour du réservoir de propergol comme élément structurel. L’énergie est fournie par des panneaux solaires et des batteries au lithium-ion.
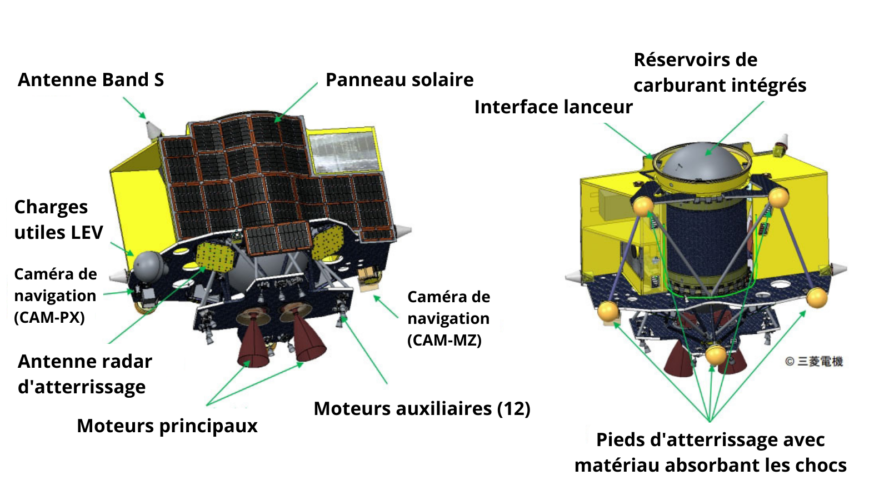
Le système d’atterrissage utilise une base en mousse d’aluminium « écrasable »de fabrication additive (impression 3D) pour absorber l’impact.
Le système de propulsion comprend deux moteurs de 500 N pour les manœuvres en orbite et douze propulseurs 22 N pour le contrôle d’attitude. Tous les moteurs et propulseurs utilisent du bipropergol hydrazine (N2H4) / tétroxyde d’azote (NTO – MON-3), stocké dans un réservoir commun séparé par une cloison.

Des objectifs scientifiques et de démonstration technologiques
SLIM transporte une caméra spectroscopique multibande (MBC, Multi-Band Camera) pour l’exploration minéralogique de la surface ainsi qu’un petit réseau de catadioptres laser (LRA, Laser Retroreflector Array).
MBC observera dans le visible et le proche infrarouge (VIS-NIR) pour prendre des images du site d’atterrissage à plusieurs longueurs d’onde. La spectroscopie permettra de vérifier la minéralogie, en particulier le nombre de MG (quantité de magnésium dans la composition minéralogique) des roches alentours. Cette minéralogie devrait permettre de rechercher des indices sur l’origine de la Lune en comparant les olivines terrestres aux échantillons de manteau lunaire exposé en bord de cratère.
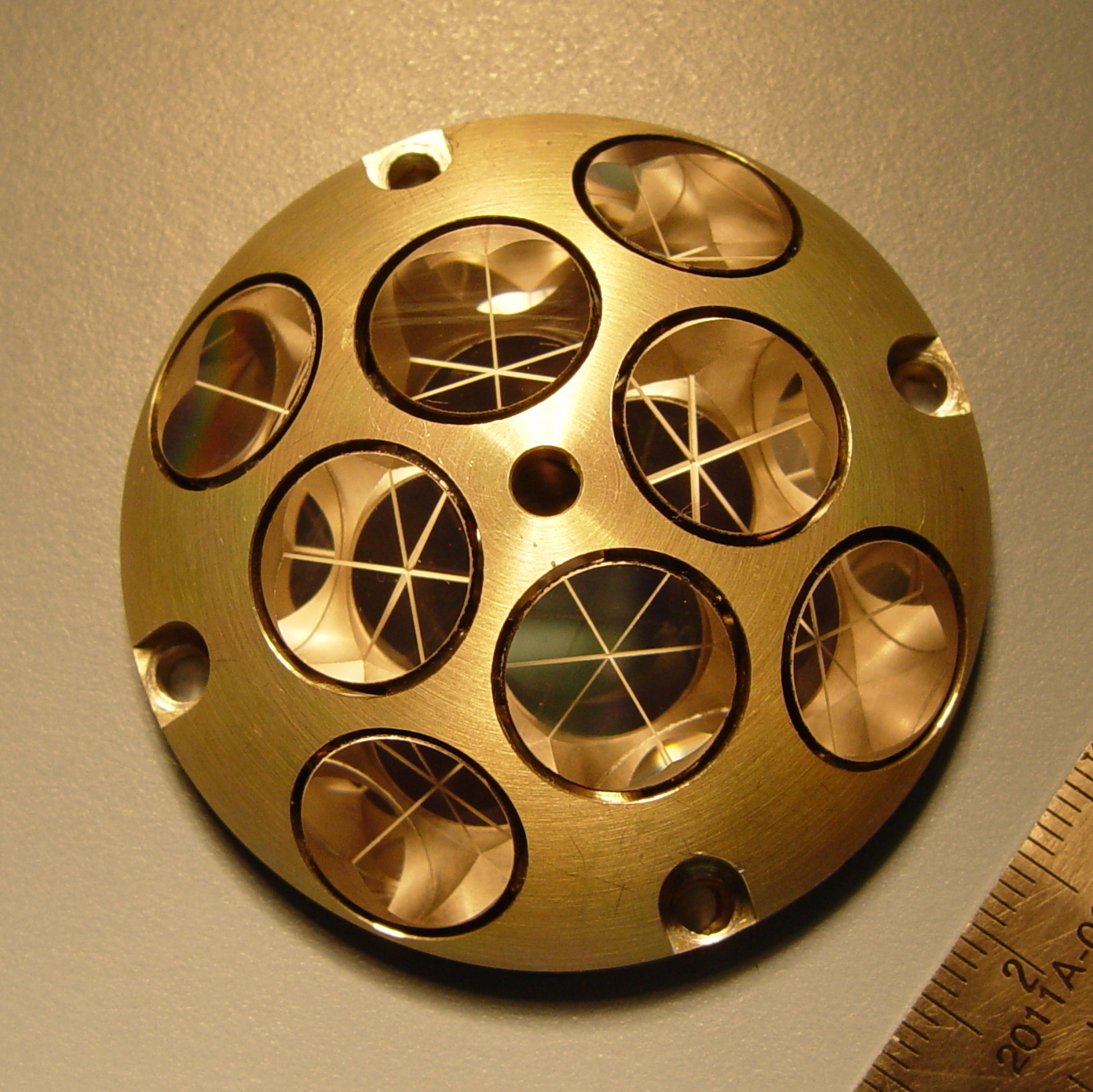
Le LRA est conçu pour utiliser la lumière laser réfléchie du laser du lander en orbite pour déterminer précisément l’emplacement de l’atterrisseur et la distance à ce point sur la surface lunaire par rapport à l’orbiteur. Les catadioptres reflètent toute lumière qui les ramène directement à la source. Le LRA se compose de huit catadioptres circulaires à cube d’angle de 1,27 cm de diamètre montés sur une plate-forme peinte à l’or hémisphérique de 5,11 cm de diamètre. Chacun des huit rétro-réflecteurs pointe dans une direction légèrement différente, et chacun a un angle d’incidence de lumière utile maximal d’environ + -20°. Quatre catadioptres sont répartis uniformément dans un anneau sur l’hémisphère à 20° du zénith et quatre dans un anneau à 40° du zénith. Ils sont fabriqués à partir de quartz Suprasil dont l’indice de réfraction est de 1,46. La section optique équivalente est de 10 000 à 100 000 mètres carrés, mais n’est toujours pas suffisante pour utiliser la télémétrie laser basée sur la Terre. La masse totale de la LRA est de 20 grammes, elle ne nécessite aucune puissance électrique.
Crédit photo et source : NASA-GSFC
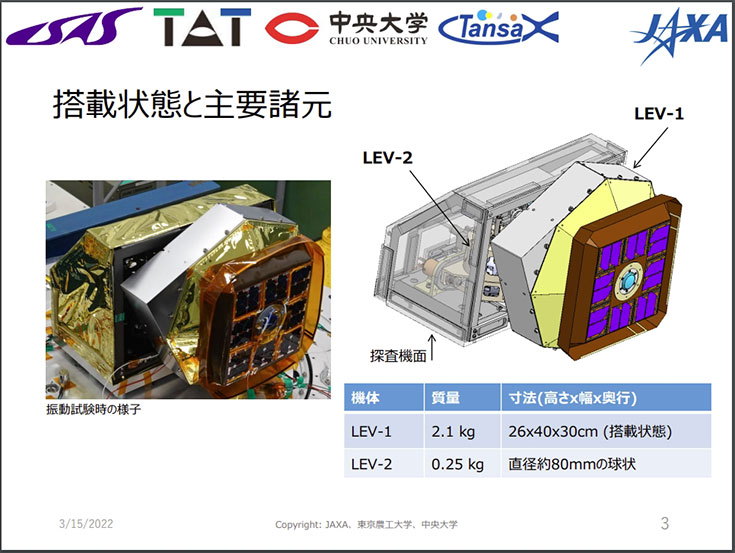
SLIM transporte également 2 petits « vaisseaux spatiaux » : LEV-1 et LEV-2, LEV pour Lunar Excursion Vehicle (vaisseau d’excursion lunaire). Ils sont éjectés du lander une fois que le moteur principal sera arrêté à environ 1,8 m de la surface lunaire.
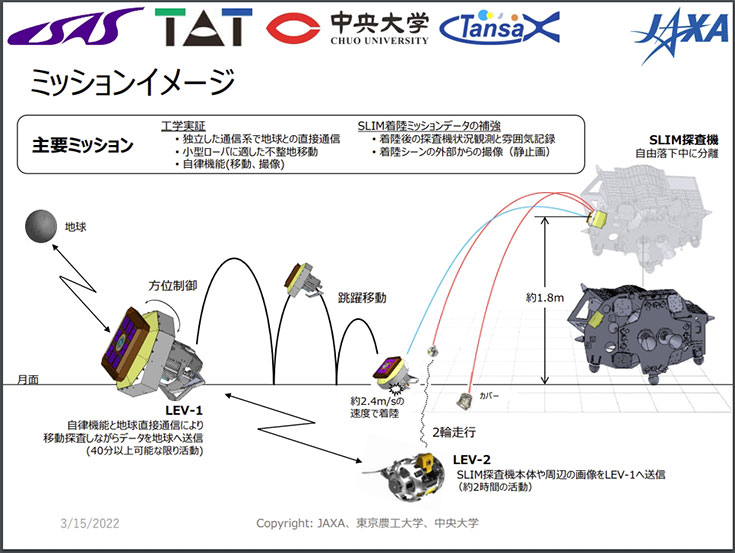
LEV-1 est un équipement de 26x40x30 cm et qui pèse 2,1 kg. Il doit effectuer une démonstration d’ingénierie en effectuant une communication directe indépendante avec la Terre. Il sera capable de sauter à la surface de la Lune en autonomie. Il est équipé d’une caméra héritée des robots Minerva largués à la surface de l’astéroïde Ryugu par la mission Hayabusa-2.
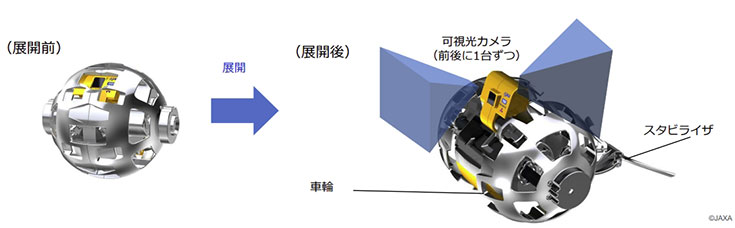
LEV-2 ou SORA-Q, dont un exemplaire était également sur Hakuto-R mais s’est crashé avec l’atterrisseur sur la Lune, est une sphère transformable de 80 mm et de 250 g, qui sera éjectée de LEV-1.
LEV-2 s’étirera vers la gauche et la droite tandis que la tête se lève et prolonge le stabilisateur comme une queue. Le deux roues sont excentrées de l’axe de rotation, ce qui permet de bouger en deux modes de conduite : « conduite de papillon » et « conduite de rampe, et à la fois sur terrain plat et sur un sol en pente. LEV-2 a une caméra devant et derrière la tête. Les données seront envoyées à LEV-1 via une communication Bluetooth et envoyées à la Terre via LEV-1.
Si tout va bien, le temps de fonctionnement de la mission depuis l’arrivée de SORA-Q sur la Lune jusqu’à la transmission des images est d’environ 1 à 2 heures.
En raison des faibles quantités de carburants à bord, SLIM n’atteindra pas l’orbite lunaire avant 6 mois après le décollage, effectué ce 7 septembre, utilisant une orbite ne nécessitant que peu de carburants pour rejoindre la Lune.
La durée de sa mission sera de 2-3 semaines en orbite lunaire et plusieurs jours sur la surface.
A suivre !
Source principale : le site de SLIM
