

SpaDex : Premier amarrage dans l’espace pour l’Inde
Grâce à sa mission SpaDex (Space Docking Experiment), l’Inde est devenue le quatrième pays à réussir un amarrage spatial autonome le 16 janvier.

L’évènement est passé au second plan de l’actualité foisonnante de janvier et particulièrement du 16 janvier, mais la mission SpaDeX de l’agence spatiale indienne, l’ISRO, est un succès historique pour l’Inde. La maîtrise de l’amarrage en orbite est nécessaire pour les futurs vols habités du programme indien Gaganyaan et également pour le retour d’échantillons depuis la Lune de la mission Chandrayaan-4.
SpaDex, une mission de démonstration technologique, a été lancée le 30 décembre 2024 depuis le Centre Spatial Satish Dhawan à bord d’une PSLV.
Deux satellites spécialement conçus, SDX01 ou Chaser [le chasseur] et SDX02 ou Target [la cible], pesant chacun environ 220 kg, ont été déployés en orbite terrestre basse à environ 470 km d’altitude.

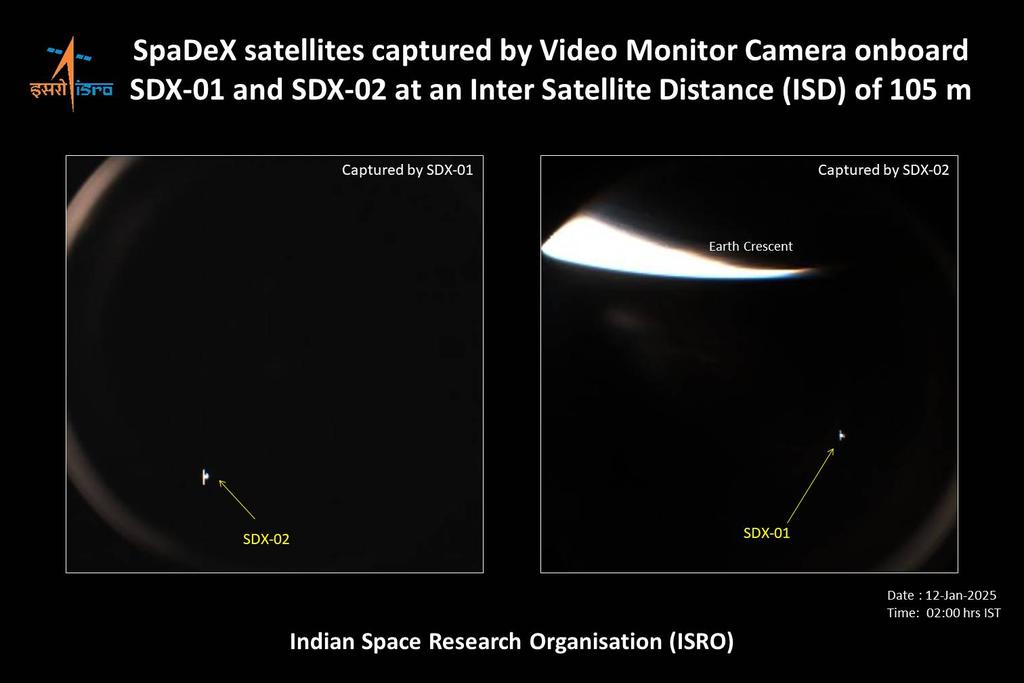
Après séparation du lanceur, les 2 satellites étaient distants d’environ 20 km afin d’effectuer un rendez-vous « lointain ».
Au fil des jours, la distance séparant les 2 satellites a été réduite par paliers : 5 km, puis 1,5 km, 500 m, 225 m, 15 m et 3 m.
Le 8 janvier, lors de la manœuvre devant amener le « Chaser » à 225 m de « Target » une dérive plus importante que prévu a été observée par les contrôleurs de vol de l’ISRO. L’amarrage prévu initialement pour le 9 janvier a été alors reporté.
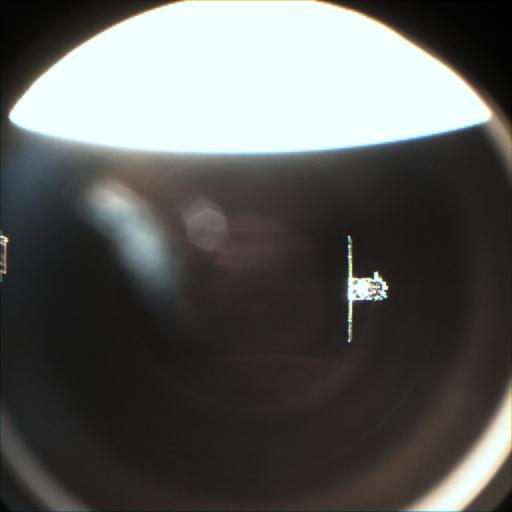
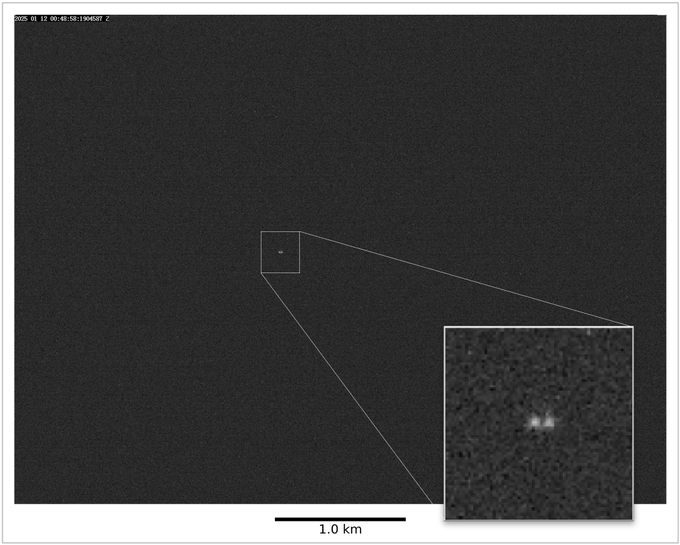
Le 12 janvier, l’ISRO a commencé la phase d’approche finale des 2 satellites SpaDeX. Tout se passe par étapes pour vérifier les données et pour éviter une collision.
Ils se sont approchés à 15 m l’un de l’autre :
L’amarrage a été finalement réalisé le 16 janvier à 0h49 UTC.
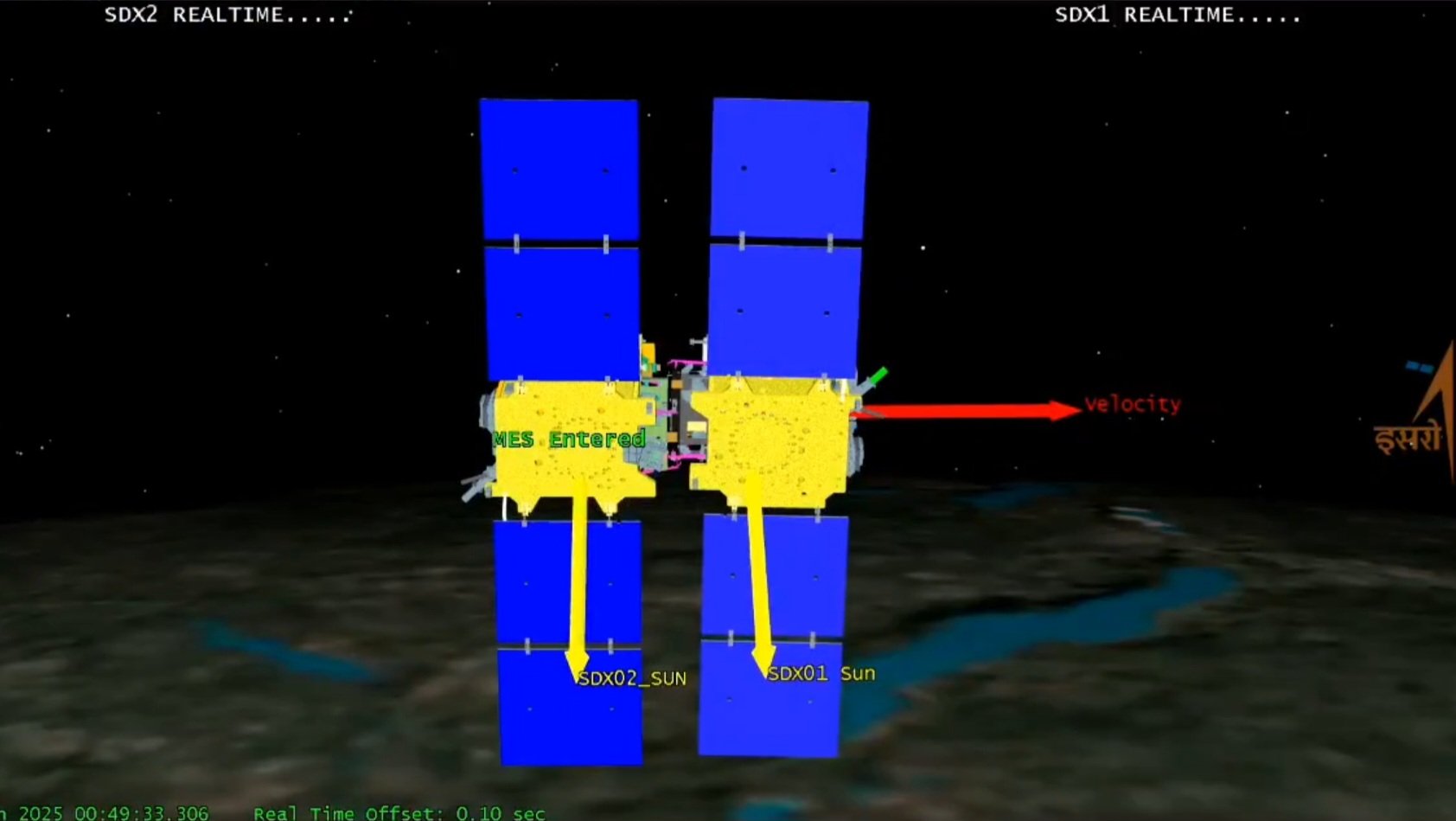
Pour réussir à bien cette mission, l’Inde a dû développer différentes technologies : un mécanisme d’amarrage, des capteurs de rendez-vous et d’amarrage à base de lasers et de réflecteurs, technologie de transfert de puissance, liaison de communication intersatellite (ISL) pour une communication autonome entre les satellites, algorithmes de détermination et de propagation d’orbite basés sur le GNSS pour déterminer la position relative et la vitesse de l’autre satellite, …
Le système d’amarrage développé est androgyne (identique de part et d’autre) et à faible impact.

Seule ombre au tableau de ce succès, les 2 satellites auraient échoué à se séparer à la suite du désamarrage [source]. Il serait retardé à mars ou avril car les 2 satellites ne seraient pas en mesure de générer suffisamment d’énergie. Mais cela n’a pas été confirmé par l’ISRO.
Les 2 satellites une fois séparés sont censés réaliser une mission secondaire d’observation de la Terre grâce à la caméra haute résolution embarquée et une charge utile multispectrale pour l’étude de la végétation, ainsi qu’une mesure de dose de rayonnement rencontrée dans l’espace à l’aide d’une charge utile dédiée.
