

Le site du crash d’Hakuto-R Resilience n’échappe pas à LRO ni à Chandrayaan-2 et les causes de l’échec
L’atterrisseur japonais Hakuto-R Resilience n’a pas réussi à alunir le 5 juin dernier. Grâce aux sondes en orbite lunaire, on peut désormais observer le site du crash.
Mise à jour du 24/06/25 avec l’analyse de la cause de l’échec
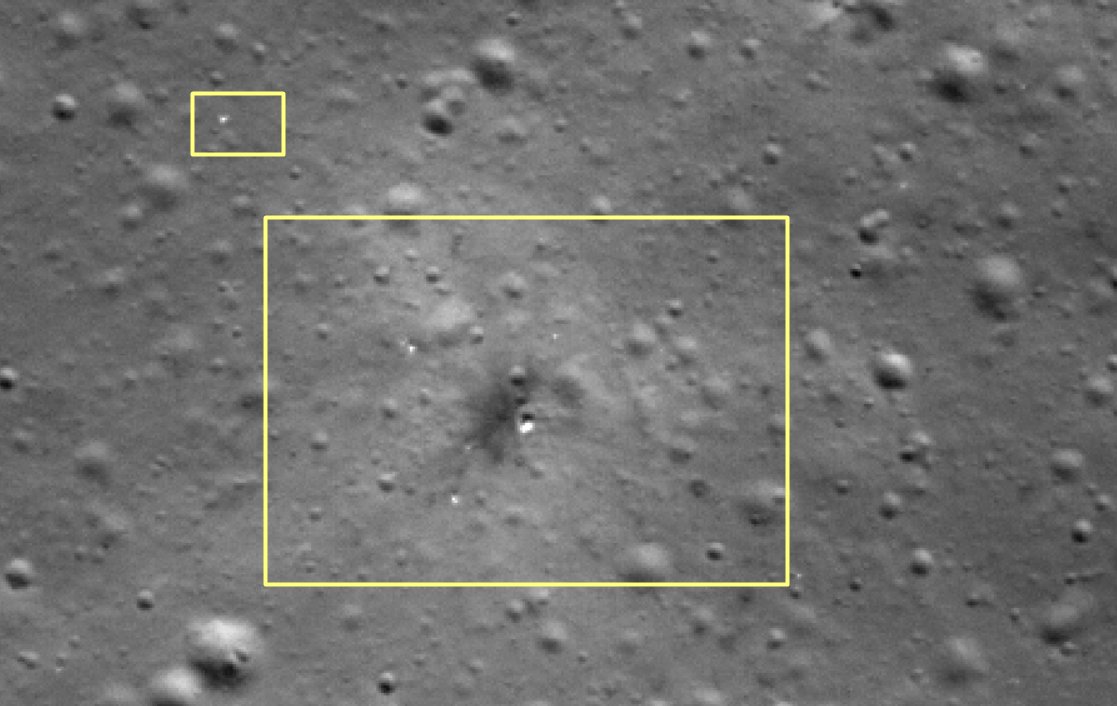
LRO repère un nouveau site de crash lunaire
La sonde Lunar Reconnaissance Orbiter (LRO) de la NASA, en orbite lunaire depuis juin 2009, a déjà permis de repérer le site des crashs de la première mission Hakuto-R, mais aussi celui de Luna 25.
Hakuto-R Mission 2 devait atterrir au niveau de Mare Frigoris (60.5°N 355.4°E). Le crash s’étant déroulé dans les dernières minutes avant l’alunissage prévu, cela limite la zone d’exploration des images prise par LRO.

Une tache sombre a été repérée aux points de coordonnées 60,4445°N, 355,4120°E, -2431,6 m d’altitude. Elle s’est très certainement formée lorsque l’atterrisseur a excavé et redistribué du régolithe peu profond. Un faible halo brillant est observé et résulte de particules de régolithe déplacées sur la surface.

Hakuto-R M2 était en tout cas sur la zone d’atterrissage prévu, mais les images semblent montrer un impact à très grande vitesse.
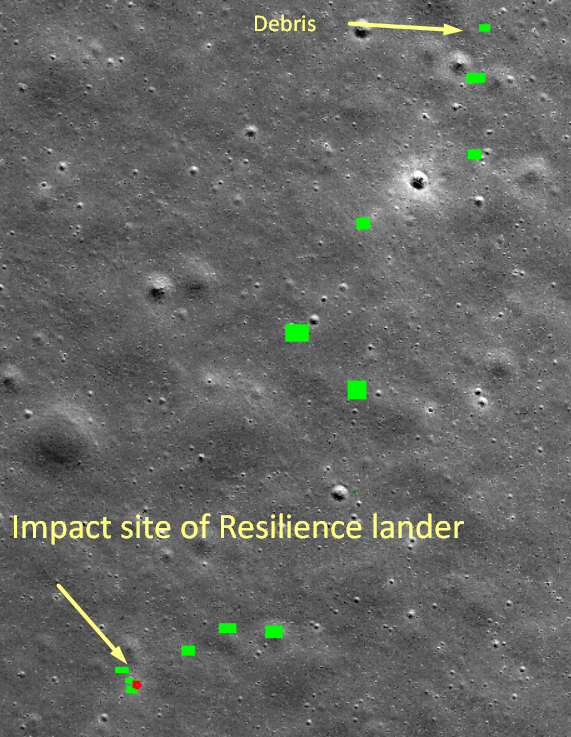
L’impact repéré sur des images de Chandrayaan-2
La mission Chandrayaan-2 de l’agence spatiale indienne n’avait pas réussi à alunir en 2019 mais l’orbiteur fonctionne toujours et sa caméra haute résolution OHRC (0,25 mètre contre 0,5-1 m pour LRO) a pu prendre des images détaillées de la zone de crash d’Hakuto-R Resilience.
Shanmuga Subramanian, un ingénieur indien, qui avait déjà découvert le site du crash de Chandrayaan-2 sur des images de LRO, a analysé les images de l’orbiteur indien prises le 16 juin et y a découvert le site du crash de Resilience.
Il a repéré plusieurs débris en plusieurs lieux.
Les causes de l’échec
ispace a tenu une conférence de presse le 24 juin à 1h00 UTC pour présenter les résultats de l’analyse des données de vol et ce qui a conduit à l’échec de l’alunissage. Les conclusions sont disponibles ici.
En résumé :
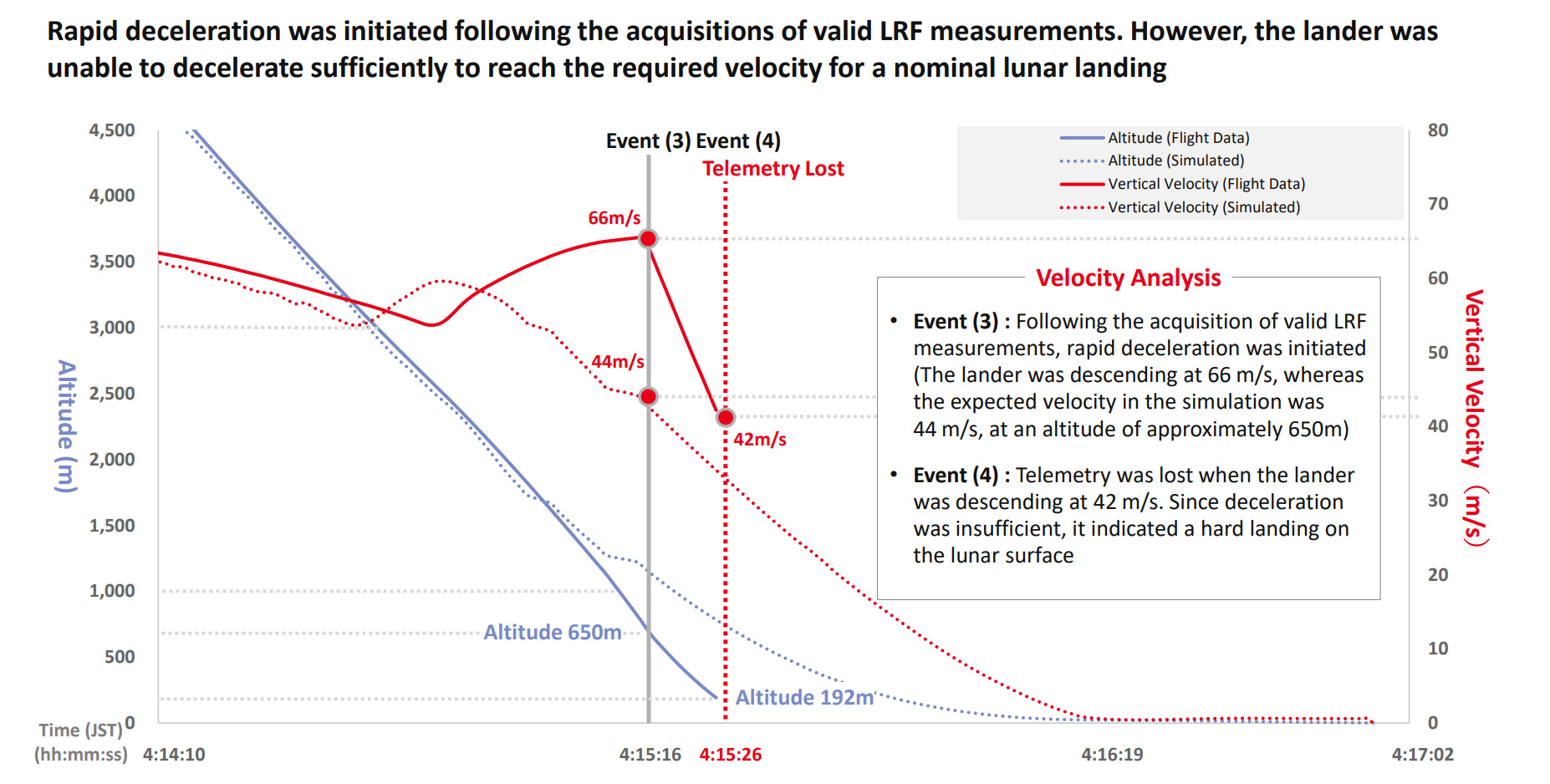
La mission a suivi les phases prévues jusqu’à la descente finale. L’atterrisseur Resilience a réussi à maintenir une attitude presque verticale, mais a perdu la télémétrie environ deux minutes avant l’heure prévue d’atterrissage, à une altitude d’environ 192 mètres et une vitesse verticale d’environ 42 m/s.
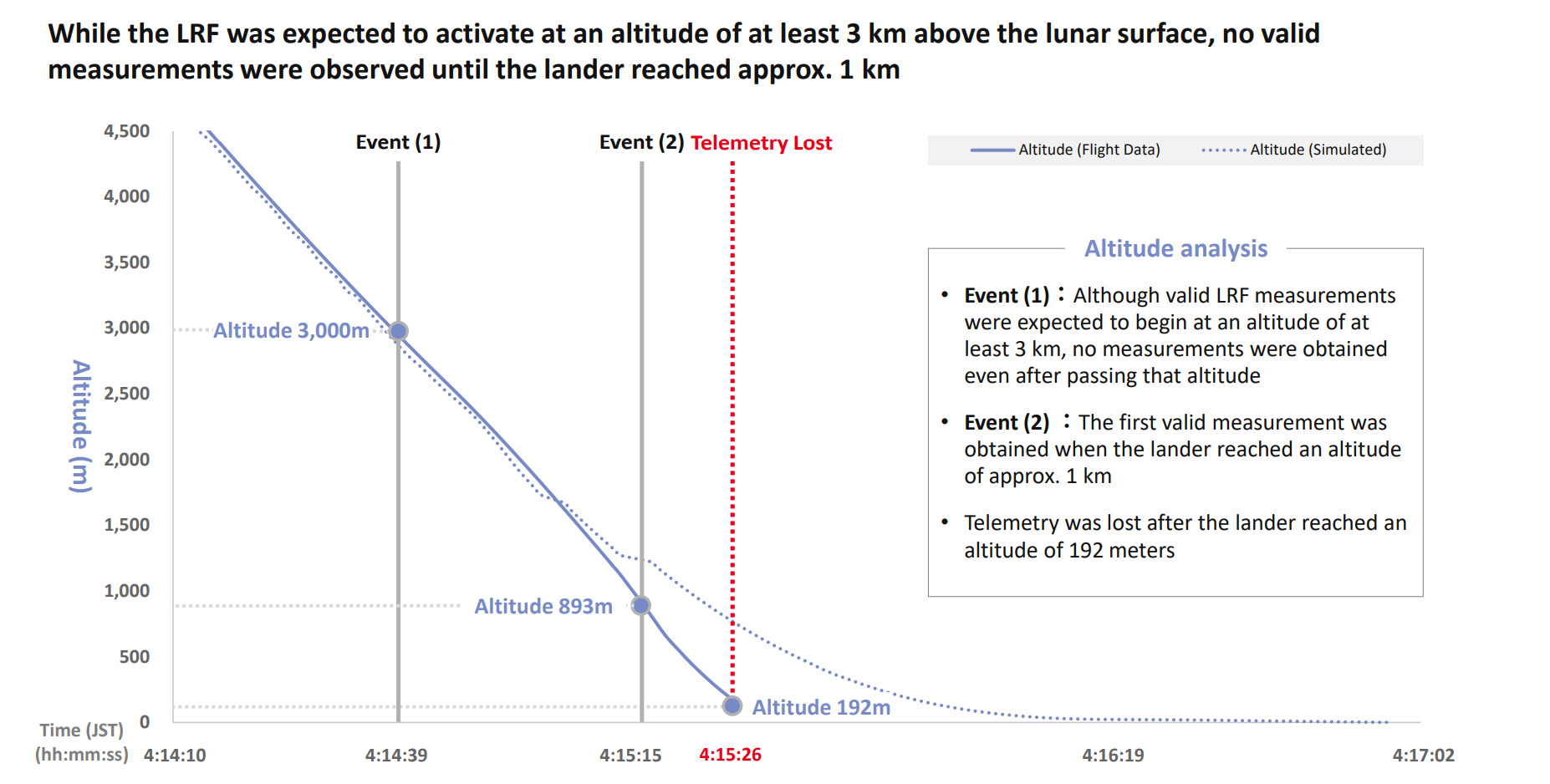
Le principal dysfonctionnement identifié concerne le Laser Range Finder (LRF), qui n’a pas fourni de mesures valides à l’altitude attendue (au moins 3 km), mais seulement à environ 1 km d’altitude. Cela a retardé la décélération nécessaire à l’atterrissage en douceur. Du coup, le module n’a pas pu ralentir suffisamment pour atteindre la vitesse requise pour un atterrissage nominal et a effectué un « hard landing » (atterrissage brutal) sur la surface lunaire, provoquant un cratère d’environ 16 mètres de diamètre.
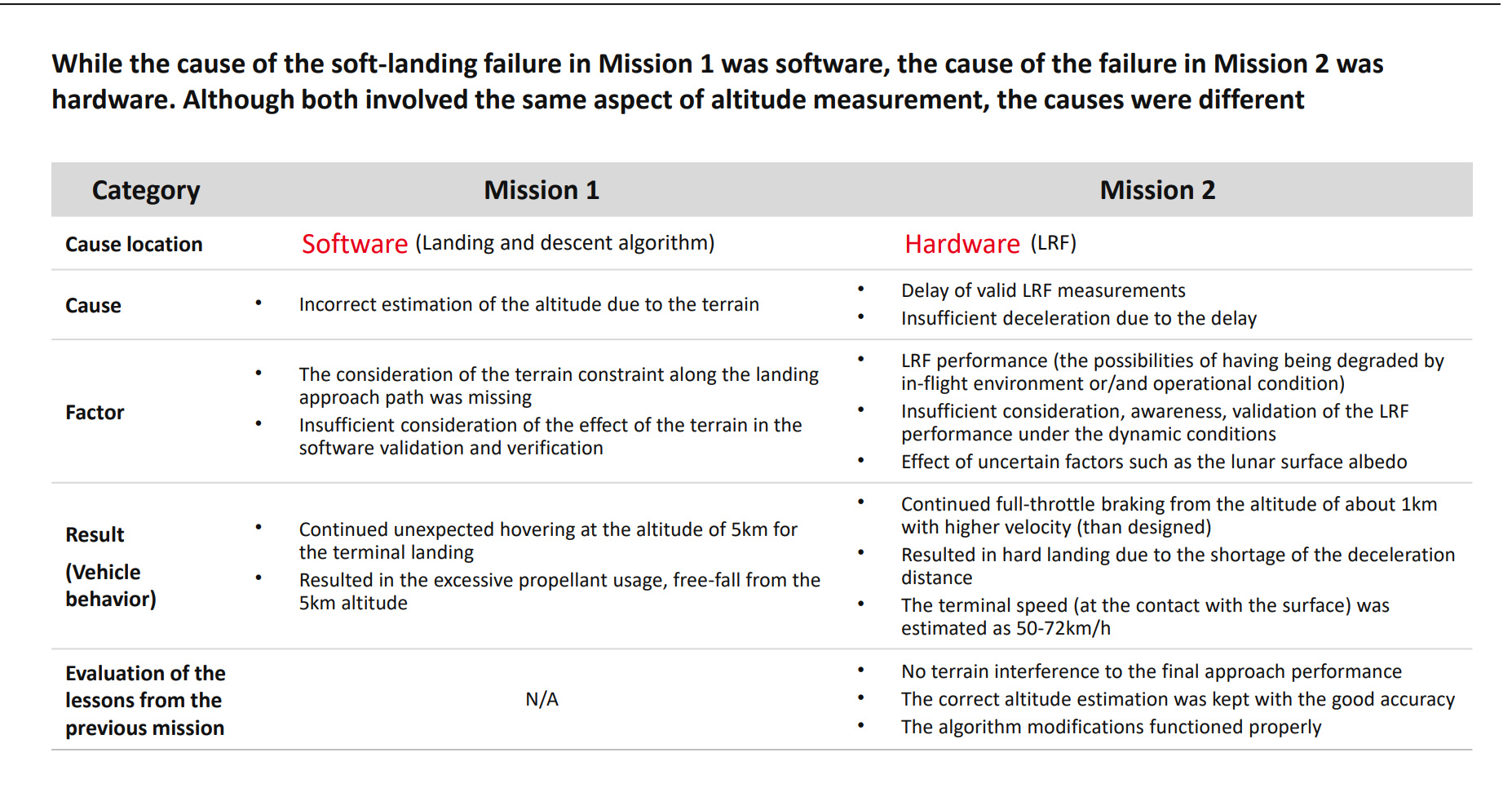
Une anomalie matérielle du LRF (probablement de type hardware) a été déterminée comme la cause principale du retard dans l’obtention des mesures de distance, empêchant le système de navigation de fonctionner correctement. Aucune anomalie n’a été détectée dans le logiciel de navigation (GNC), l’orientation du LRF, le contrôle d’attitude ou le système de propulsion. Les causes de l’échec de la Mission 2 sont différentes de la Mission 1.
Le critère de succès n°9 (atterrissage réussi) n’a pas été atteint, et la mission a été considérée comme terminée sans accomplissement de l’objectif principal.
Une revue approfondie des plans de test est prévue, ainsi que la création d’un groupe de travail externe pour examiner les mesures de développement pour les missions suivantes. Des améliorations techniques et organisationnelles seront mises en œuvre avec le soutien de tiers, dont la JAXA.
Sources images : LROC et Shanmuga Subramanian
