

Quoi de neuf pour Perseverance depuis l’atterrissage ?
Le rover Perseverance a atterri le 18 février sur le sol martien. Depuis, plein de choses se sont passées : tests des instruments, premiers tours de roues, premiers tirs laser, … Voici les différentes opérations menées depuis un peu plus d’un mois.

Hommage à l’écrivaine Octavia Butler
Lors d’une conférence de presse le 5 mars, la NASA a publié un bilan de santé de 2 semaines sur Mars pour Perseverance.
Le site d’atterrissage a été baptisé Octavia E. Butler en l’honneur de l’écrivaine de science-fiction afro-américaine, née à Pasadena, là où se trouve le Jet Propulsion Laboratory de la NASA où sont conçus les rovers martiens.

«Les protagonistes d’Octavia Butler incarnent la détermination et l’inventivité, ce qui en fait une personne idéale pour la mission du rover Perseverance et son thème de surmonter les défis», a déclaré Kathryn Stack Morgan, scientifique adjointe du projet Perseverance. «Butler a inspiré et influencé la communauté scientifique planétaire et bien d’autres au-delà, y compris celles qui sont généralement sous-représentées dans les domaines STEM.»
Des noms Navajo pour les sites de Perseverance
Les équipes des missions à la surface de Mars attribuent habituellement des surnoms non officiels (c’est l’Union Astronomique Internationale qui donne les noms officiels pour les caractéristiques planétaires) aux points de repère comme moyen facile de faire référence aux roches, aux sols et à d’autres caractéristiques géologiques d’intérêt. Les équipes de rover précédentes ont nommé ces points de repères d’après des régions d’intérêt géologique sur Terre ainsi que des personnes et des lieux liés aux expéditions.
En collaboration avec la Nation Navajo, l’équipe du rover a nommé des caractéristiques sur Mars avec des mots de la langue Navajo. Avant le lancement, l’équipe de Perseverance a divisé le site d’atterrissage du cratère Jezero en une grille de quadrangles, ou «quads», d’une superficie d’environ 2,6 kilomètres carrés. L’équipe a décidé de nommer ces quads après les parcs nationaux et les réserves sur Terre avec une géologie similaire. Persévérance a atterri dans le quad nommé d’après le monument national du Canyon de Chelly en Arizona (Tséyi ‘en Navajo), au cœur de la nation Navajo.

L’équipe a passé les semaines depuis l’atterrissage à vérifier le rover pour se préparer aux opérations de surface. En effet, les étapes sont nombreuses pour vérifier et étalonner chaque système, sous-système et instrument sur la mission.

Pour commencer, le logiciel de bord a été mis à jour le 26 février, ou Sol 8 (8e jour depuis l’atterrissage), de sa version « phase de croisière entre la Terre et Mars » à la version dédiée à l’exploration de la surface martienne. Cette mise à jour va permettre au rover d’avancer en mode semi-autonome.
Déploiement de MEDA ✅
Le déploiement de l’instrument MEDA (Mars Environmental Dynamics Analyzer, situé sur le mât de télédétection du rover a été réalisé au Sol 10 (10e jour martien de la mission). MEDA est un ensemble de capteurs météorologiques qui fournira des infos sur la vitesse et la direction du vent, la température, l’humidité et le contenu en poussière de l’air.
La station météo MEDA fonctionne parfaitement, les relevés de pression et de température correspondent aux modèles avec une bonne sensibilité des capteurs aux fluctuations météo.
Plus récemment, les contrôleurs ont vérifié les instruments RIMFAX (Radar Imager for Mars’s Subsurface Experiment), le radar pour l’examen sous la surface martienne, et MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment) l’instrument qui devrait produit une petite quantité d’oxygène à partir du CO2 de l’atmosphère martienne.
Déploiement du bras robotisé ✅
Une autre étape importante a eu lieu le 2 Mars ou Sol 12, lorsque les ingénieurs ont désarrimé le bras robotisé de 2 mètres de long.$ jusqu’à présent attaché sur le pont du rover.

Les premiers mouvements de la tourelle d’une masse de 45 kg (15 kg de plus que celle de Curiosity) ont été également effectués.
La caméra WATSON de l’instrument SHERLOCK a fait ses premières photos au Sol 11. Placée au bout du bras, elle va permettre de photographier le sol de près et sous le rover (voir plus bas).

Premiers tours de roues ✅
Avant les premiers tours de roues, les ingénieurs du Jet Propulsion Laboratory ont testé le mouvement des roues.

Perseverance a effectué son premier trajet sur Mars le 4 mars, couvrant 6,5 mètres sur le sol martien. Le court trajet de 33 minutes a servi de test de mobilité. Le rover a parcouru 4 mètres vers l’avant puis il a ensuite tourné sur place de 150° vers la gauche et reculé de 2,5 mètres.

Une fois que le rover commencera à réaliser ses objectifs scientifiques, des trajets réguliers jusqu’à 200 mètres ou plus par jour devraient être effectués.
D’ailleurs deux trajets sont encore à l’étude pour aller explorer le delta du cratère Jezero puis la vallée Neretva : par le nord (en bleu) ou par le sud (en violet). Les deux options de trajets pour rejoindre le delta sont en cours de discussion et d’analyse dans l’équipe scientifique.

Mais Perseverance doit se rendre d’abord à un endroit approprié pour tester Ingenuity, son hélicoptère-drone (voir plus bas).
Supercam : déjà les premiers tirs 🔫
SuperCam, l’un des principaux instruments d’analyse du rover a été développé conjointement par le Los Alamos National Laboratory (LANL) au Nouveau-Mexique et un consortium de laboratoires de recherche français sous les auspices du CNES. L’instrument a livré ses premières données au centre d’opérations de l’Agence spatiale française à Toulouse lors d’une conférence en ligne le 10 mars.

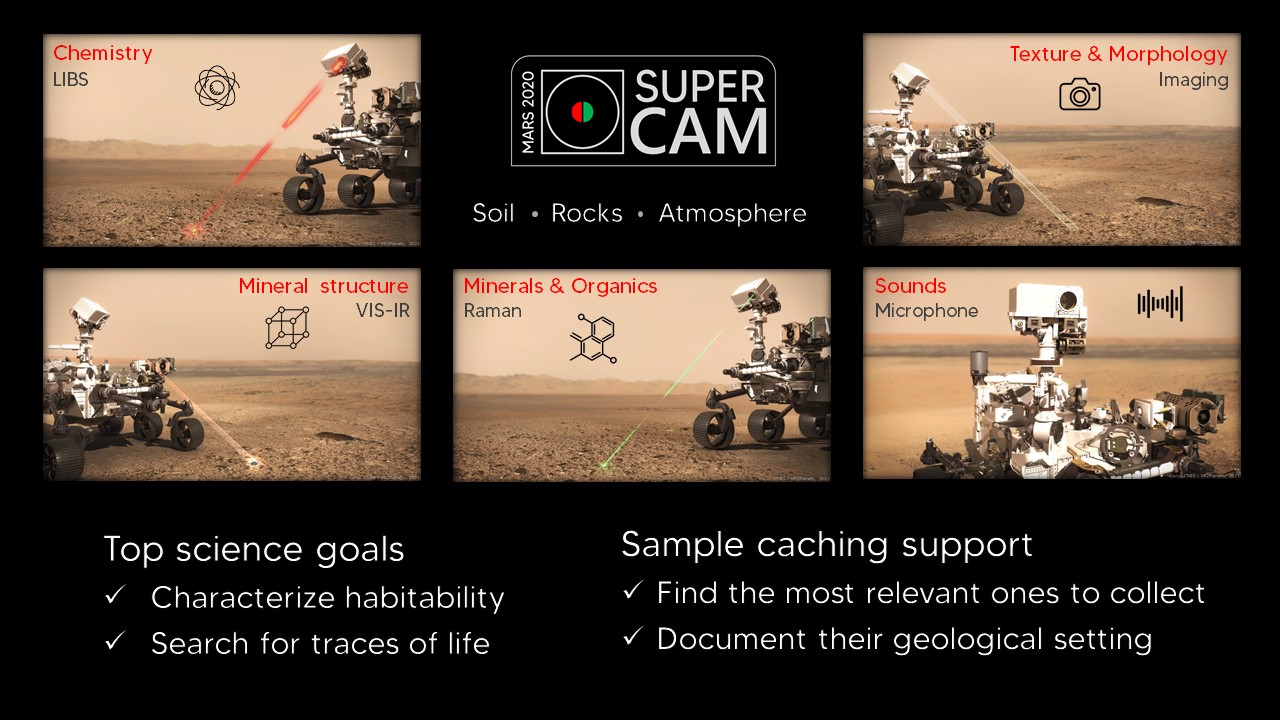
Supercam est un ensemble instrumental réunissant 5 techniques de mesures différentes :
- LIBS (Laser Induced Breakdown Spectroscopy) ou Spectrométrie sur plasma induit par un faisceau laser infrarouge puissant, dont la portée peut aller jusqu’à 7 mètres, pour donner la composition élémentaire (atomique) des roches visées.
- L’imageur couleur RMI (Remote Micro-Imager) à très haute résolution. Une évolution par rapport à ChemCam du rover Curiosity dont l’imageur était en nuances de gris.
- Un spectromètre en lumière visible et proche infrarouge (VIS-IR) qui recueille la lumière réfléchie par le Soleil pour étudier la teneur en minéraux des roches et des sédiments.
- Un spectromètre Raman qui utilise un faisceau laser vert pour l’analyse de la minéralogie des roches de Mars. Cette méthode permet de caractériser précisément la structure moléculaire des minéraux jusqu’à sept mètres du rover, mais aussi de détecter certaines molécules organiques. C’est le premier spectromètre extraterrestre de ce type.
- Un microphone scientifique développé par l’école ISAE-SUPAERO de Toulouse pour écouter le vent martien et les sons émis par les roches frappés par LIBS.
SuperCam se compose en fait de 3 parties :

Le Mast Unit, installé dans la tête du rover, a été conçu par le CNES et l’IRAP. Il contient les lasers, la caméra RMI (télescope) et le microphone.
Photo : Intégration à l’Irap du modèle de vol n°2 de l’instrument SuperCam pour la mission Mars 2020 – (crédit © CNES/LE BRAS Gwenewan, 2019)
Le Body Unit, situé à l’intérieur de rover, conçu par le LANL. C’est la partie « cerveau » de SuperCam. La lumière est transférée du Mast Unit au Body Unit par une longue fibre optique.
Photo : Derniers tests et vérifications de l’instrument SuperCam à l’IRAP, avant sa livraison au Jet Propulsion Laboratory de la Nasa pour son intégration sur le rover de la mission Mars 2020. (crédit CNES/LE BRAS Gwenewan, 2019)


Les cibles d’étalonnage sur le pont du rover, fournies par l’Université espagnole de Valladolid, qui comprennent des éléments visuels pour ajuster la mise au point du RMI et divers échantillons pour l’étalonnage des quatre spectromètres de l’instrument. Le RMI peut observer des grains de poussière aussi petits que 100 microns sur les cibles d’étalonnage SuperCam à l’arrière du rover
Assemblée à partir de 5 images, la mosaïque de droite montre la cible d’étalonnage de l’instrument SuperCam à bord du rover Perseverance. Les images des composants ont été prises par le micro-imageur distant (RMI) de SuperCam les 1er, 2 et 4 mars 2021. Chaque image a un champ de vision de 2,9 cm de diamètre (crédit NASA / JPL-Caltech / LANL / CNES / CNRS)
En savoir plus aussi sur cette belle vidéo du CNRS (à 1’00 » pour le détail de Supercam) :
Au Sol 12 de la mission, SuperCam a tiré sur la cible Maaz (Mars en Navajo), une roche implantée dans le sol qui semble avoir une texture fine et scientifiquement intéressante, et a obtenu son premier spectre LIBS qui confirme la nature de la roche ciblée : une roche basaltique (fer, silicium, potassium, manganèse, ..). Il s’agit soit d’une roche ignée (en d’autres termes, volcanique), soit de grains fins de matière ignée qui ont été cimentés ensemble dans un environnement aqueux. La cible était à 3,17 mètres du rover. Le champ de vision de l’image ci-dessous est de 6 centimètres de diamètre.

Au Sol 16 (7 mars 2021), les ingénieurs ont pu tester la combinaison de Supercam, des caméras de navigation NavCam et de l’instrument Mastcam-Z afin de fournir plusieurs vues de la cible Yeehgo (Yéigo (diligent) en Navajo, mais nom non compatible avec le logiciel du rover), situé à 3,325 mètres du rover.
Chacune des deux images de la mosaïque montre un champ de vision de 6,2 cm de diamètre (crédit NASA / JPL-Caltech / LANL / CNES / CNRS / ASU / MSSS)
Les protections larguées ✅
Le panneau de protection de manipulation des échantillons « belly pan » a été largué le 13 mars (Sol 22).

Les ingénieurs ont pu ainsi vérifier l’état des tubes qui seront remplis des échantillons récoltés de roches martiennes et ensuite laissés sur le sol pour récupération par la mission Mars Sample Return.

Au Sol 30 (21 mars), le capot de protection de l’hélicoptère-drone Ingenuity a été largué.

Le débarquement de l’hélicoptère-drone Ingenuity ne devrait pas tarder, probablement début avril. L’équipe de la mission a choisi l’endroit pour le tester.
Messages cachés sur Sherloc 🔎
Le 17 mars, Perseverance a photographié les cibles de calibration de l’instrument SHERLOC avec la caméra WHATSON.
Les 5 cibles de droite sont des lames minces de minéraux de type silicates.
Les 4 cibles rectangulaires à gauche sont des échantillons de tissus utilisés actuellement dans les combinaisons des astronautes : Teflon, Vectran et Dacron. Ils servent à évaluer leur résistance à l’environnement martien.

Le JPL fidèle à ses éléments cachés (rappelez-vous le code caché dans le parachute de descente sur la surface) a mis plusieurs « easter eggs » sur cette cible.
La 2e cible en partant du bas est un disque servant de calibration à l’intensité du laser de Sherloc, avec un motif en forme de labyrinthe dont la silhouette de Sherloch Holmes apparait au centre !

La cible ronde de la rangée à gauche est une couche de verre recouvert de polycarbonate, le même que celui qui constitue la visière des astronautes. En photographiant les motifs à travers le polycarbonate, la caméra WATSON verra si des fissures se forment dans ce matériau. Au centre se trouve l’inscription 221BBAKER : c’est l’adresse de Sherlock Holmes, 221B Baker Street à Londres. Il y a aussi 1 série de bonhommes qui dansent illustrant le message codé de l’une des nouvelles d’Arthr Conon Doyle, Les Hommes dansants avec Sherlock Homes.

De nouveaux sons martiens 🔉
La NASA et le CNES ont publié le 9 mars les premiers sons enregistrés par SuperCam.
Le microphone de SuperCam a enregistré le souffle du vent martien seulement environ 18 heures après l’atterrissage, le mât supportant l’instrument est toujours replié, puis un enregistrement au Sol 4 après le déploiement du mât, et enfin les premiers sons des tirs laser.
L’atmosphère martienne étant moins dense que l’atmosphère terrestre et de nature bien différente (composée essentiellement de dioxide de carbone), le son ne se propage pas sur Mars comme sur Terre.
A l’occasion des premiers tours de roues le 7 mars, la NASA a publié le 17 mars le son enregistré par le micro qui devait enregistrer le son pendant la descente atmosphérique de Perseverance le 18 février mais qui n’avait pas fonctionné.
https://soundcloud.com/nasa/sounds-of-perseverance-mars-rover-driving-sol-16-16-minutes
Le bruit généré par l’interaction des roues et de la suspension du rover avec la surface peut être entendu, ainsi qu’un bruit de grattage aigu. L’équipe d’ingénierie de Perseverance continue d’évaluer la source du bruit de grattage, qui peut être soit des interférences électromagnétiques provenant de l’un des boîtiers électroniques du rover, soit des interactions entre le système de mobilité du rover et la surface martienne.
Et plein d’images !
Sinon Perseverance a photographié un dust devil, un nuage de poussière soulevé par le vent martien ! Regardez à droite de l’image :
Au moment de l’écriture de la publication de cet article, les caméras de la mission ont déjà envoyé plus de 12 000 images sur Terre grâce aux différents orbiteurs martiens comme le Trace Gas Orbiter de l’ESA, MAVEN, Mars Odyssey ou Mars Reconnaissance Orbiter de la NASA. Toutes les images brutes sont disponibles ici : https://mars.nasa.gov/mars2020/multimedia/raw-images/ et certains passionnés font des traitements d’images sublimes, comme les Français Thomas Apperé ou Damia Bouic:

Sources : https://mars.nasa.gov/mars2020/news/ et https://supercam.cnes.fr/fr
Image de couverture :
