

Premiers tours de roues sur Mars pour le rover chinois Zhurong
Un peu moins d’une semaine après l’atterrissage réussi sur Mars de la mission chinoise Tianwen-1, le rover chinois Zhurong a quitté l’atterrisseur et est descendu sur le sol martien ce 22 mai à 2h40 UTC.
La China Aerospace Science and Technology Corporation (CASC) a confirmé l’information officiellement d’abord sans photo. Puis les clichés en noir et blanc sont arrivés dans les heures suivantes :


Cette descente sur le sol martien est arrivée après des vérifications des sous-systèmes et une étude de la zone d’atterrissage.
Après l’atterrissage réussi, l’orbiteur avait modifié son orbite afin de relayer les images et les données de l’ensemble atterrisseur/rover. Désormais Tianwen-1 fait le tour de Mars en 8,2 heures pour permettre des communications avec Zhurong plus fréquentes.
L’ensemble des premières images dans cette vidéo :
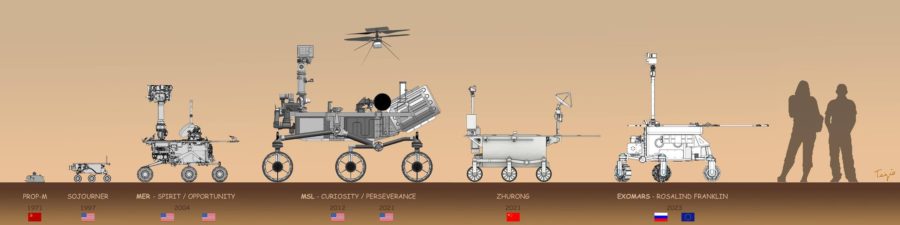
Zhurong, un rover pas si petit que ça

Le rover Zhurong a une durée de vie de 90 jours martiens (ou 92,5 jours terrestres). Il pèse 240 kg et est plutôt assez grand, 1,85m de haut, 2,6m de long sur 3 m de large après le déploiement des panneaux solaires, soit environ 2 fois la taille du rover Yutu-2 lunaire, et plus grand que les premiers rovers Spirit et Opportunity de la NASA.
Zhurong devrait avoir une vitesse similaire à celle de Yutu d’environ 200 mètres par heure, mais la hauteur des obstacles qu’il peut surmonter est passée de 20 centimètres à 30 centimètres. Il peut gravir des pentes jusqu’à 20 degrés. Les six roues de Zhurong sont entraînées indépendamment, selon ses concepteurs, lui permettant de se déplacer à la fois sur un sol sableux meuble et des roches densément réparties, et même de rouler « en crabe ».
Le rover est composé de 10 sous-systèmes : la structure, les mécanismes, l’antenne de communication, le contrôle thermique, les systèmes d’alimentation électrique de stockage et de distribution. Il a la capacité de dormir et de se réveiller de manière autonome.
Une partie de l’énergie produite par les panneaux solaires pendant la journée sera utilisée pour le travail scientifique, et le reste sera stocké dans des batteries pour une utilisation nocturne. En outre, les concepteurs ont installé des fenêtres de collecte de chaleur sur le rover, qui pourraient absorber l’énergie solaire pendant la journée et libérer de la chaleur la nuit pour aider le rover à survivre aux températures glaciales qui pourraient descendre sous -100°C. Les panneaux solaires ont un revêtement spécial qui pourrait limiter le dépôt de poussières martiennes dessus et la mobilité des « ailes de papillon » pourraient permettre de secouer cette poussière pour la retirer en partie.
Que va faire Zhurong ?
L’objectif scientifique de la mission Tianwen-1 est d’étudier la morphologie et les caractéristiques de la structure géologique de Mars, les caractéristiques du sol à la surface de Mars et la distribution de la glace d’eau, la composition du matériau de surface sur Mars, l’ionosphère de Mars et les caractéristiques du climat et de l’environnement de surface, le champ physique et la structure interne de Mars, etc.
Zhurong embarque plusieurs instruments scientifiques :

Le rover transporte six charges utiles scientifiques pour étudier la topographie, la géologie, la structure du sol, les minéraux et les types de roches et l’atmosphère dans la région d’Utopia Planitia.
- NaTeCam [Terrain Camera sur le schéma ci-dessus] : Une paire de caméras de navigation et de terrain de 2048 × 2048 pixels montées sur le mât du rover pour fournir une imagerie panoramique 3D, aider à la navigation et étudier la topographie et la géologie de Mars.
- MSCam [Multispectral Camera sur le schéma ci-dessus] : Une caméra multispectrale installée sur le mât entre les NaTeCams pour fournir des informations sur les matériaux de surface et leur distribution sur neuf bandes spectrales. Il couvre huit bandes spectrales ainsi que la lumière visible.
- MarSCoDe [Mars Surface Composition Detector sur le schéma ci-dessus] : Le détecteur de composition de surface de Mars comprend un spectromètre de spectroscopie de dégradation induite par laser (LIBS), qui vaporise les roches pour analyser leur composition [similaire aux lasers de Curiosity et Perseverance].
- RoPeR [Mars Rover Subsurface Exploration Radar sur le schéma ci-dessus] : Un radar pénétrant captant des données d’écho pour étudier le sol et la glace d’eau potentielle sous la surface. Deux canaux de fréquence sonderont les couches souterraines jusqu’à 10 mètres avec une résolution verticale au centimètre près et jusqu’à 100 m avec une résolution de 1 m.
- RoMAG [Mars Magnetic Field Detector sur le schéma ci-dessus] : un magnétomètre monté sur mât pour mesurer le champ magnétique. Il fonctionnera avec un autre magnétomètre à bord de l’orbiteur.
- MCS [Mars Meteorology Monitor sur le schéma ci-dessus] : La station météorologique combine un certain nombre de capteurs pour collecter des données sur la température, la pression, la vitesse et la direction du vent.
Sources : différents articles d’Andrew Jones, twitter et site de la CNSA ou CASC