

Athena, la seconde mission d’Intuitive Machines pour l’exploration de la Lune
Un peu plus d’un an après le succès relatif de son premier atterrisseur lunaire IM-1 Odysseus en 2024, l’entreprise américaine Intuitive Machines envoie sa seconde mission lunaire : Athena.

Intuitive Machines a surnommé ainsi la mission : « Tout comme la figure de la mythologie grecque, Athena incarne des qualités de sagesse et de réflexion stratégique, poussant les ingénieurs d’Intuitive Machines à exceller dans leurs efforts techniques quotidiens alors qu’ils explorent la surface lunaire ». « L’inclusion d’Athéna comme homonyme de la mission reflète un élément de narration, honorant l’aspect féminin après la représentation masculine d’Ulysse dans la mission précédente ».

Sommaire :
Le pôle sud lunaire pour cible
Le nouvel atterrisseur IM-2 (Intuitive Machines-2) a été conçu une nouvelle fois dans le cadre du contrat CLPS de la NASA (Commercial Lunar Payloads Services, services de charge utile lunaire commerciale) de la NASA qui a pour objectif de stimuler le développement d’atterrisseurs lunaires.
Les objectifs d’Athena : déployer à la surface lunaire des charges utiles de démonstration technologique pour la recherche d’eau et la quantification de la glace d’eau, et l’identification de substances volatiles dans le sol lunaire, à proximité de Mons Mouton, un plateau proche du pôle sud lunaire.
Mons Mouton, anciennement appelé Leibnitz Beta, se situe entre les cratères Nobile et Malapert, à environ 160 km du pôle Sud lunaire, sur la face visible de la Lune et est l’une des régions potentiellement choisies pour le vol habité Artemis III.

IM-2 Athena = IM-1 en mieux
IM-2 Athena est basé sur l’atterrisseur lunaire Nova-C utilisé lors de IM-1 en y intégrant des améliorations telles qu’un lidar et l’atterrissage autonome avancé alimenté par l’apprentissage automatique (machine learning) et l’intelligence artificielle. La configuration des pieds d’atterrissage a été modifiée ainsi que l’emplacement des réservoirs d’hélium placé plus bas.

NOVA-C offre une capacité de charge utile de 130 kg avec sa forme hexagonale de 1,6 m de large sur 4,7 m de hauteur, pour une masse plus importante de 2 320 kg. Il y a 7 caméras à bord : 4 pour offrir des vues sur l’atterrisseur à 360°, une caméra localisée près de la charge utile PRIME-1 pour capturer le forage et 2 caméras sur Grace Hopper.

IM-1 avait échoué à se poser correctement sur la Lune le 22 février 2024 en se cassant une « jambe » d’atterrissage. Intuitive Machines a indiqué qu’ils avaient effectué 100% des corrections à faire avant la seconde mission, notamment au niveau des communications avec l’atterrisseur (modification de la configuration pour améliorer la bande passante) à et de la détermination de son orbite. Ils ont amélioré également leur procédure de vérification pour ne pas rencontrer à nouveau un problème de désactivation de la sécurité sur un télémètre laser sur IM-1 avant le lancement, qui n’avait pas pu être activé comme prévu.
IM-2 suit une trajectoire similaire à celle d’IM-1 : Après des vérifications en orbite terrestre des sous-systèmes, l’atterrisseur commencera son voyage vers la Lune de 4 à 5 jours. Après l’insertion en orbite lunaire, il restera sur orbite lunaire pendant 1,5 à 3 jours pour une tentative d’alunissage annoncée actuellement au 6 mars.

Si l’atterrissage se passe bien, la première priorité est d’établir un état d’alimentation électrique du lander stable, en veillant à ce qu’Athena génère plus d’énergie qu’elle n’en consomme. Une fois stable, des images du site d’atterrissage devraient être envoyées sur Terre avant le déploiement du rover MAPP, du Micro Nova Hopper et puis de la suite de forage PRIME-1, dans cet ordre. Après cinq jours d’opérations sur la surface lunaire, viendra le temps de déployer le dernier rover, Yaoki.

Intuitive Machines s’attend à terminer les objectifs de la mission IM-2 après environ dix jours d’opérations à la surface lunaire avant que le Soleil ne se couche sur le pôle sud lunaire, rendant Athéna inutilisable en raison des températures extrêmes.
Des charges utiles de la NASA et des équipements commerciaux à bord
La mission IM-2 transporte cette fois plus de charges utiles de la NASA : 10 au lieu des 6 sur IM-1. D’autres clients commerciaux sont à bord du lander : Lonestar Data Holdings, Columbia Sportswear, Nokia, Lunar Outpost, Puli Space, Dymon Co. Ltd, le Centre aérospatial allemand (DLR).
PRIME-1 (Polar Resources Ice Mining Experiment 1)
Un objectif clé d’IM-2 est le déploiement de PRIME-1 de la NASA. L’instrument Polar Resources Ice Mining Experiment 1 est capable d’identifier et de quantifier l’eau sous forme de glace et d’autres substances volatiles dans le sol lunaire grâce à une perceuse pouvant atteindre un mètre dans la surface.
Grâce aux données des engins spatiaux en orbite autour de la Lune, les scientifiques pensent que les régions polaires sont riches en eau sous la surface lunaire. Mais la NASA n’a jamais exploré ces régions ou détecté directement l’eau. PRIME-1 aidera à identifier et à évaluer l’abondance et la qualité de l’eau dans une zone susceptible de contenir de la glace. Pour la première fois, la NASA échantillonnera et analysera la glace située sous la surface grâce à un robot.
PRIME-1 est une suite à deux instruments composée d’une perceuse TRIDENT (The Regolith Ice Drill for Exploring New Terrain) et d’un spectromètre de masse MSolo (Mass Spectrometer observing lunar operations).
- TRIDENT est une foreuse télécommandée de régolithe et de glace d’environ 1 mètre pour une masse de 36 kg. L’instrument peut forer en plusieurs segments, en faisant des pauses et en se rétractant pour déposer les déblais à la surface après chaque augmentation de profondeur. La foreuse a été développée par Honeybee Robotics de Pasadena (Californie), une entreprise de Blue Origin.

- Msolo est un spectromètre de masse commercial modifié pour le vol spatial qui évaluera les déblais de forage pour détecter et quantifier l’eau et des composés chimiques volatils (gaz) et potentiellement de l’eau et de l’oxygène qui seront ramenés à la surface par la perceuse. Des échantillons de sol provenant de plusieurs profondeurs seront analysés.

Le déploiement de TRIDENT et de MSolo est effectué à l’aide d’une grande palette de précision, 3PO (Prime-1 Precision Pallet Offloader), équipée d’un bras articulé qui l’abaisse doucement sur la surface lunaire pour les opérations de forage. Pour maximiser l’analyse des éjectas de la perceuse, un pare-soleil flexible est également déployé [voir la vidéo en fin d’article à 5’56 »].
LRA
Athena contribue également à poursuivre les missions précédentes et en cours. Par exemple, l’atterrisseur transporte un petit dispositif en aluminium fourni par la NASA appelé Laser Retroréflective Array (LRA), que l’agence spatiale a l’intention d’utiliser comme nœud dans un réseau lunaire plus vaste pour localiser plus précisément les emplacements des principaux atterrisseurs lunaires.

Une charge utile « sauteuse » : Grace Hopper
Intuitive Machines a développé le Micro-Nova Hopper qui peut « sauter » jusqu’à 500 mètres de l’atterrisseur, prendre des images de surface détaillées et explorer un cratère avoisinant. Le Hopper est surnommé Grace en hommage à Grace Hopper, une informaticienne américaine, mathématicienne et contre-amirale de la marine américaine. Elle est considérée comme l’une des pionnières de l’informatique moderne.

Athena est équipé d’un mécanisme développé par Intuitive Machines pour déployer Grace : le HDM (Hopper Deployment Mechanism) est composé d’une étagère de lancement en titane, d’entretoises de support supérieures escamotables et d’un système précis de rail de guidage roulant tolérant à la poussière pour déployer Grace sur le côté d’Athena [voir la vidéo en fin d’article à 4’47 »]

Pouvant accueillir jusqu’à 10 kg de charges utiles, Grace embarque des instruments hongrois et allemand pour collecter des données scientifiques :
- PLWS (Puli Lunar Water Snooper) est un spectromètre à neutrons développé par Puli Space, basé en Hongrie [Puli était un concurrent officiel du défi Google Lunar XPRIZE], et sélectionné par la NASA. Cet instrument miniature, pesant seulement 400 grammes est conçu pour identifier et mesurer la concentration de glace d’eau dans le sol lunaire par spectroscopie neutronique, effectuer des mesures de rayonnement pour caractériser l’environnement neutronique de l’albédo de la Lune. PLWS est supporté par l’ESA.
- LRAD (Lunar RADiometer) est un radiomètre du DLR qui étudiera les températures de surface lunaire et éventuellement identifier les endroits suffisamment froids pour supporter des dépôts de glace d’eau stables.


Dans ce qui devrait être son avant-dernier saut, Grace devrait descendre dans un petit cratère ombragé en permanence à environ 400 m du site d’atterrissage. Ce serait la première fois qu’un système à la surface lunaire irait explorer un cratère où le soleil ne brille jamais. Grace utilisera ensuite ses instruments pour analyser la roche et le sol à l’intérieur du cratère à la recherche de concentrations d’hydrogène, ce qui indiquerait la présence d’eau.

Le rover MAAP « Lunar Voyage One »
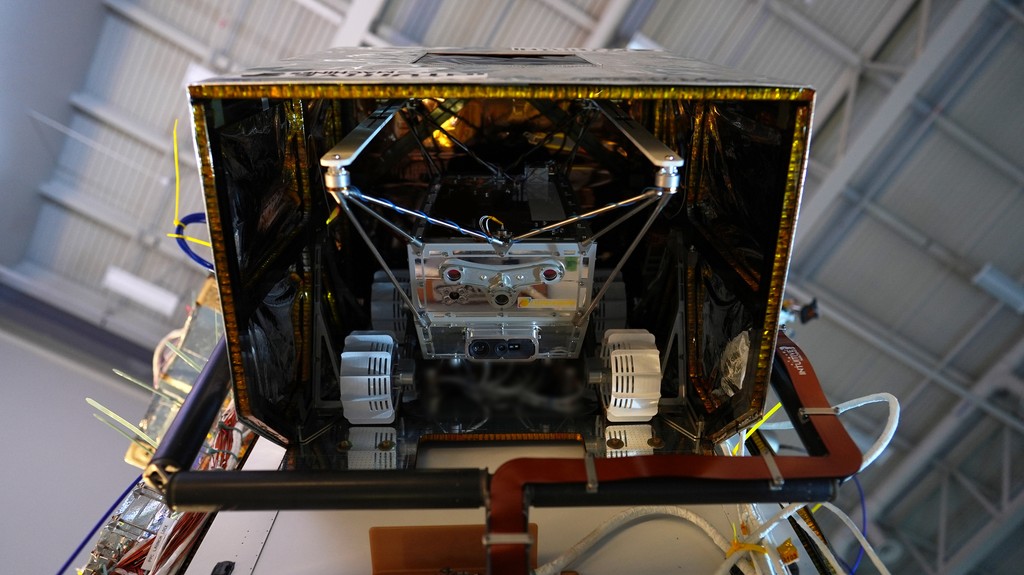
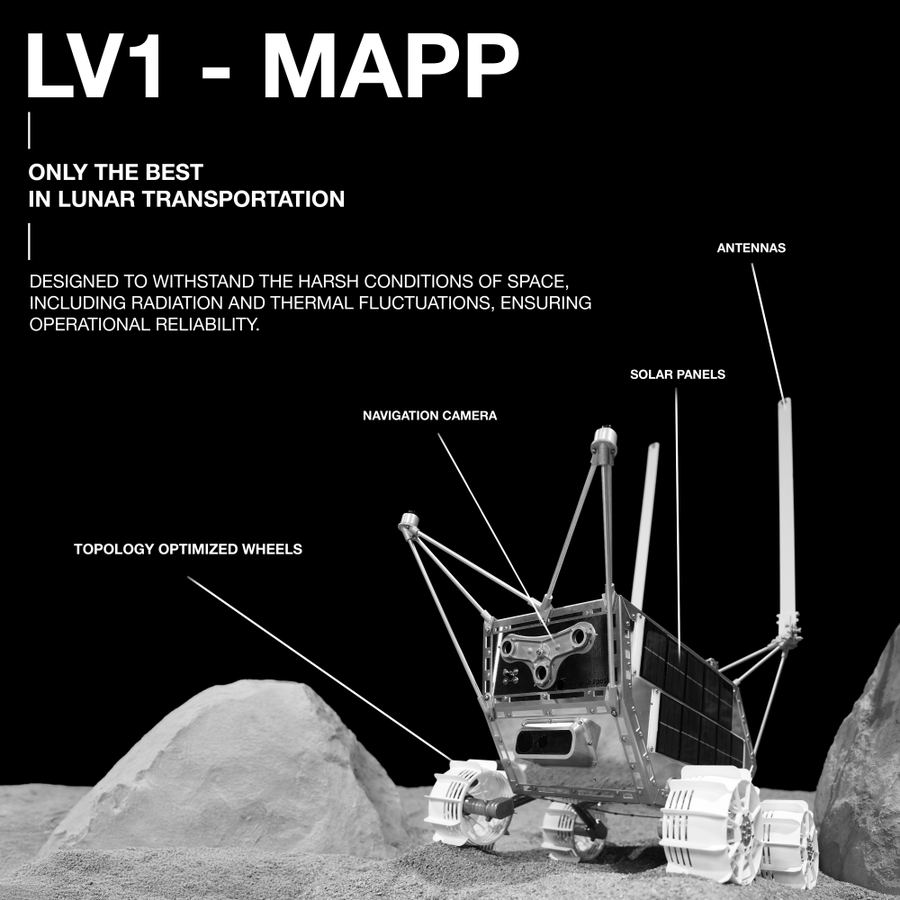
Le rover MAPP (Mobile Autonomous Prospecting Platform) de Lunar Outpost, pour sa première mission « Lunar Voyage One« , pourrait devenir le premier rover privé aux environs du pôle sud lunaire. Avec des systèmes de navigation avancés qui fonctionnent sans GPS, MAPP utilisera des repères visuels et des capteurs pour naviguer de manière autonome et éviter les dangers. Selon Lunar Outpost, ses roues spécialisées et sa suspension à culbuteur [comme la suspension arrière d’une moto] lui permettront de traverser un terrain difficile avec précision. Le rover est équipé du système de communications de surface lunaire de Nokia.
D’une masse de 10 kg maximum et de capacité de charge utile de 15 kg maximum, MAAP mesure 45 x 38 x 40 cm. Il peut avancer jusqu’à 10 cm/seconde.
Le mécanisme RDM (Rover deployment Mechanism) doit déposer le rover en toute sécurité et en douceur sur la surface lunaire. Le RDM est doté d’une structure composite « garage » intelligemment articulée sur un mât déployable, qui permet au rover d’être orienté latéralement pour un lancement optimal mais passe après la libération du verrou du mécanisme à une configuration horizontale qui s’adapte passivement aux irrégularités du terrain. Le mât comprend une nouvelle charnière tolérante à la poussière et un amortisseur visqueux pour contrôler la vitesse de déploiement. Un câble électrique plat fournit de l’électricité au rover [voir la vidéo en fin d’article à 3’47 »]. Les mécanismes pour le déploiement du MAAP et du Hopper ont subi de nombreux tests de vibrations, de charge statique, de cycles thermiques et des tests de déploiements fonctionnels à de multiples inclinaisons.
Une fois que le rover s’est mis sous tension et s’est connecté au réseau de communication LSCS, Athena abaissera son garage jusqu’à la surface lunaire. Le rover MAAP roulera alors vers l’avant de plusieurs mètres et relèvera ses antennes de communications. MAAP devrait s’éloigner jusqu’à 2 kg de l’atterrisseur.
Le petit rover Yaoki
L’entreprise japonaise Dymon Co. Ltd a développé un petit rover, Yaoki, qui prendra des images de la surface lunaire tout en manœuvrant rapidement dans un rayon de 50 mètres d’Athena.

Yaoki ne mesure que 14,9 x 14,9 x 9,9 cm et pèse seulement 498 grammes. Il peut résister à un impact de 100 G. YAOKI vient du proverbe japonais “Nanakorobi Yaoki”. Ce mot signifie “pour remonter encore et encore, peu importe combien de fois vous échouez”.

Le premier réseau 4G à la surface de la Lune par Nokia
Nokia Bell Labs va déployer le premier réseau cellulaire 4 G/LTE sur le pôle Sud de la Lune lors d’IM-2. Le système de communication de surface lunaire LSCS (Lunar Surface Communication System) est un système repensé le réseau terrestre pour répondre aux besoins critiques de communication des futures missions vers la Lune et Mars. Selon le fabricant, LSCS est hautement résilient, entièrement intégré et extrêmement compact, capable de fonctionner de manière autonome dans les conditions environnementales difficiles de la Lune. Le réseau est embarqué sur Athena, MAPP et Grace Hopper.
Le LSCS transmettra les images et les données télémétriques du rover MAAP à Athena, qui relayera ensuite les informations vers la Terre. Lunar Outpost utilisera cette connectivité pour émettre des commandes, envoyant le rover à différents points d’intérêt de la région de Mons Mouton.

Le LSCS transmettra les télécommandes au Grace Hopper pour les différents sauts. La connexion devrait être perdue une fois le Hopper dans le cratère et de manière autonome il devrait en ressortir et rétablir la connexion avec le lander.
Les couvertures thermiques de Columbia
Comme c’était le cas sur Odysseus IM-1, la technologie Omni Heat Infinity de Columbia est à bord d’Athena pour protéger les systèmes clés des températures extrêmes dans l’espace et sur la Lune. Pour IM-2, les couvertures isolantes OMNI-Heat Infinity recouvrent les réservoirs d’hélium de l’atterrisseur, tandis que l’OMNI-Shade Sun Deflector de Columbia est utilisé pour protéger le pont supérieur d’Athena.

L’opportunité d’observer une éclipse depuis la surface lunaire
Si tout se passe bien, Athena pourrait observer une éclipse de la Terre par la Lune le 14 mars vers 7h00 UTC. Pendant l’éclipse, le Soleil, la Terre et la Lune seront alignés, avec la Terre au milieu. De la Terre, nous verrons une éclipse lunaire où la Lune semble disparaître dans le ciel nocturne. Sur la surface lunaire Athéna verra le Soleil balayer de droite à gauche à l’horizon, en passant derrière la Terre, avant de réapparaître. Tout comme avec une éclipse solaire sur Terre, Athena sera dans le noir. Elle devra survivre à l’éclipse grâce à l’énergie emmagasinée dans sa batterie jusqu’à la réapparition du Soleil. L’atterrisseur Surveyor 3 de la NASA a déjà observé ce phénomène en 1967.

Athena a été lancé sur Falcon 9 le 27 février avec d’autres charges utiles : le Lunar Trailblazer de la NASA, Odin d’Astroforge [article à venir] et un remorqueur (spacetug) CHIMERA-GEO pour l’orbite géostationnaire.

Intuitive Machines travaille déjà à la troisième mission IM-3 qui transportera d’autres expériences de la NASA sur la Lune.

Top article ! Super intéressant de voir comment Athena va chercher de la glace sur la Lune. Le drone Grace Hopper, ça promet !